Matavimų samprata ir klasifikacija. Trumpas pagrindinių matavimų tipų aprašymas. Matavimų rūšys ir metodai Matavimo metodai ir jų charakteristikos
Matavimas reiškia procesą, kai fiziškai lyginamas tam tikras dydis su tam tikra verte, imama matavimo vienetu. Matavimas yra pažinimo procesas, kurį sudaro eksperimentinis išmatuotos vertės palyginimas su tam tikra verte, imama matavimo vienetu. realių objektų parametrai; matavimui atlikti reikia eksperimentų; eksperimentams reikia specialios technikos reiškia – reiškia išmatavimai; 4, matavimo rezultatas yra fizinio dydžio vertė.
Pasidalinkite savo darbais socialiniuose tinkluose
Jei šis darbas jums netinka, puslapio apačioje yra panašių darbų sąrašas. Taip pat galite naudoti paieškos mygtuką
Pagrindinės charakteristikos ir matavimo metodai
1 Matavimų apibrėžimai ir klasifikacija
3 Pagrindinės matavimo charakteristikos
1 Matavimų apibrėžimai ir klasifikacija.
Matavimas fizinio dydžio vertės radimas empiriškai naudojant specialias technines priemones. Matavimas reiškia procesą, kai fiziškai lyginamas tam tikras dydis su tam tikra verte, imama matavimo vienetu.
Matavimas pažinimo procesas, kurį sudaro eksperimentinis išmatuotos vertės palyginimas su tam tikra verte, imama matavimo vienetu.
Iš matavimų apibrėžimo vadovaukitės matavimų charakteristikomis:
1) matuojami tik fizikiniai dydžiai, t.y. realių objektų parametrai;
2) matavimas reikalauja eksperimentų;
3) eksperimentams atlikti reikalingos specialios techninės priemonės - matavimo priemonės;
4) matavimo rezultatas yra fizikinio dydžio reikšmė.
Pagrindinė matavimo lygtis yra tokia:
A = X, (1)
čia A yra išmatuota vertė ir matavimo vienetas; X skaitinė išmatuoto dydžio reikšmė su pasirinktu matavimo vienetu. Iš lygties vadovaukitės matavimo proceso sąlygomis:
- fizinio dydžio vieneto atkūrimas mato pavidalu;
- išmatuoto signalo konvertavimas;
- išmatuoto kiekio palyginimas su matu;
- matavimo rezultato įrašymas.
Priklausomai nuo išmatuoto dydžio vertės nustatymo metodo, matavimai skirstomi į:
- tiesus;
- netiesioginis;
- kaupiamasis;
- Bendras.
Tiesioginis Tai vadinama matavimu, kai norima fizikinio dydžio reikšmė randama tiesiogiai iš eksperimentinių duomenų. Pažymėtina, kad tiesioginiai matavimai dažnai suprantami kaip tie, kuriuose nėra atliekamos tarpinės transformacijos. Tai, pavyzdžiui, įtampos ir srovės matavimas gerai žinomais elektriniais matavimo prietaisais – voltmetrais ir ampermetrais. Tiesioginiai matavimai yra labai paplitę metrologinėje praktikoje. Matematiškai tiesioginius matavimus galima apibūdinti elementaria formule
A = x, (2)
kur x jį išmatavus rasto ir vadinamo dydžio vertėmatavimo rezultatas.
Netiesioginis yra matavimas, kurio metu norima dydžio vertė randama remiantis žinomu šio dydžio ir dydžių, kuriems taikomas tiesioginis matavimas, ryšiu. Netiesioginius matavimus galima apibūdinti pagal šią formulę:
A = f (x 1, x 2,…, x m), (3)
kur x 1, x 2,…, x m tiesioginių dydžių, susijusių su žinomu funkciniu ryšiu, matavimų rezultatai f su norima išmatuoto kiekio verte A .
Netiesioginiai matavimai būdingi matavimo praktikai telekomunikacijų sistemose, pavyzdžiui, galios matavimas ampermetro-voltmetro metodu, svyruojančios grandinės rezonansinio dažnio nustatymas pagal tiesioginių grandinės talpos ir induktyvumo matavimų rezultatus, atstumo nustatymas. į optinio kabelio nehomogeniškumo vietą atgalinės sklaidos metodu ir kt.
Su kaupiamaisiais matavimaisvienu metu matuojami keli to paties pavadinimo dydžiai, o norimos jų reikšmės randamos sprendžiant lygčių sistemą, gautą tiesiogiai matuojant įvairius šių dydžių derinius. Pavyzdžiui, matavimai, kurių metu kondensatorių rinkinio talpos dydis randamas iš žinomos vieno kondensatoriaus talpos vertės ir tiesioginio įvairių kondensatorių kombinacijų talpos dydžių palyginimo rezultatų.
Sąnarių išmatavimaisusideda iš dviejų ar daugiau skirtingų pavadinimų kiekių matavimo vienu metu, siekiant rasti ryšį tarp jų.
Jungtinių matavimų pavyzdys rezistoriaus varžos priklausomybės nuo temperatūros nustatymas.
2 Matavimo metodų klasifikacija
Yra du pagrindiniai matavimo metodai:
- Tiesioginio vertinimo metodas, kuriame išmatuotos vertės dydis yra ant skalės, skaitmeniniame ekrane arba prietaiso ekrane, pavyzdžiui, matuojant įtampą voltmetru.
- Palyginimo su matu metodas,kurioje išmatuoto dydžio vertė lyginama su matu atkuriamo kiekio reikšme. Šis metodas turi šias veisles.
1) Kontrastinis metodas, kuriame matu išmatuotų ir atkuriamų dydžių reikšmė įtakoja palyginimo įrenginį ir jo pagalba nustatomas ryšys tarp šių dydžių.
2) Diferencialas (skirtumas) metodas , su juo išmatuota vertė nustatoma pagal skirtumą tarp norimos vertės ir matavimo atkuriamos vertės.
3) Nulinis metodas ypatinga byla skirtumas, kai skirtumas sumažinamas iki nulio.
4) Pakeitimo metodas išmatuotas dydis pakeičiamas matu, lygiu jam pagal dydį.
5) Atitikties metodas- išmatuoto dydžio reikšmė nustatoma pagal signalų, ženklų ar kitų ženklų, susijusių su išmatuotais ir žinomais dydžiais, sutapimą.
Taikant pakeitimo metodą ir nulinį metodą, reikia naudoti daugiareikšmį matą.
Ši matavimo metodų klasifikacija parodyta fig. 1.
1 paveikslas
3. Pagrindinės matavimo charakteristikos
Pagrindinės matavimų charakteristikos yra: rezultatas ir paklaida.
Rezultatas fizikinio dydžio matavimai (trumpai matavimo rezultatas arba tiesiog rezultatas) fizikinio dydžio reikšmė, gauta jį išmatavus.
Gauti rezultatai dažnai koreguojami.
Pataisa (angl. Correction) to paties pavadinimo kaip ir matuojamas fizinio dydžio reikšmė, kuri įvedama į matavimo rezultatą, siekiant neįtraukti tam tikrų, vadinamųjų.sistemingasklaidų komponentai (žr. 2 skyrių), kuris atsispindi terminologijoje:
- nepataisyta matavimo rezultatas išmatuota fizikinio dydžio vertė, gauta prieš pataisymus;
- pataisyta matavimo rezultatas išmatuota fizikinio dydžio vertė ir patikslinta, įvedant reikiamus jo pakeitimus;
Matavimo prietaiso klaidaskirtumas tarp matavimo priemonės rodmenų ir tikrosios išmatuoto fizikinio dydžio vertės.
Matavimo kokybėpasižymi tikslumu, teisingumu, konvergencija ir atkuriamumu, patikimumu, taip pat leistinų paklaidų dydžiu.Matavimo kokybėsavybių rinkinys, lemiantis rezultatų gavimą su reikiamomis tikslumo charakteristikomis, reikiama forma ir per nustatytą terminą.
Matavimo rezultato tikslumasviena iš matavimo kokybės charakteristikų, atspindinti matavimo rezultato artumą nuliui. Didelis matavimo tikslumas atitinka mažas paklaidas. Tikslumas kiekybiškai įvertinamas santykinės klaidos modulio abipuse verte, pavyzdžiui, jei santykinė paklaida yra 0,01, tai tikslumas yra 100.
Teisingi išmatavimaicharakteristika, atspindinti matavimo rezultatų sisteminių paklaidų artumą nuliui.
Matavimo rezultatų konvergencijato paties dydžio matavimų, pakartotinai atliktų tomis pačiomis priemonėmis, tuo pačiu metodu, tomis pačiomis sąlygomis ir tokiu pat rūpestingumu, rezultatų artumas vienas kitam.
Atkuriamumasto paties fizikinio dydžio matavimo rezultatų artumas, gautas skirtingose vietose, skirtingais metodais ir priemonėmis, skirtingais operatoriais, skirtingu laiku, bet sumažintas iki tų pačių sąlygų (temperatūros, slėgio, drėgmės ir kt.).
Patikimumas būdingas matavimų kokybei, atspindintis pasitikėjimą jų rezultatais, kuris nustatomaspasitikėjimo tikimybėα tai tikroji išmatuoto dydžio vertė A yra tam tikru intervalu. Toks intervalas vadinamas konfidencialūs o tarp jos ribų su duotupasitikėjimo tikimybė
(3)
randama tikroji vertė A vertinamas parametras. (3) parametre q klaidų reikšmingumo lygis(žr. 2 skyrių); , apatinę ir viršutinę pasikliautinojo intervalo ribas.
Literatūra
1. Pakelia I.M. Standartizacijos, metrologijos, sertifikavimo pagrindai. M.: Yurayt, 2011 m.
2. Sergejevas A.G., Latyševas M.V., Teregerija V.V. Metrologija. Standartizavimas. Sertifikavimas. M.: Logos, 2013 m.
3. Krylova G.D. Standartizacijos, sertifikavimo, metrologijos pagrindai. M.: VIENYBĖ-DANA, 2013 m.
4. Pakelia I.M. Standartizacija, metrologija, sertifikavimas. M.: Yurayt, 2013 m.
5. Basakovas M.I. Gaminių ir paslaugų sertifikavimas su standartizacijos ir metrologijos pagrindais. Rostovas prie Dono, 2012 m.
Kiti panašūs darbai, kurie gali jus sudominti.vshm> |
|||
| 6301. | Katalizatorių technologinių rodiklių klasifikacija. Pagrindinės heterogeninių katalizatorių technologinės charakteristikos. Laboratoriniai jų nustatymo metodai | 23,63 KB | |
| Elemento padėtis Periodinė elementų lentelė, t.y. atomų ir jonų elektroninių apvalkalų struktūra galiausiai nulemia visas pagrindines chemines ir serijas fizines savybes medžiagų. Todėl katalizinio aktyvumo palyginimas kietosios medžiagos su juos sudarančių elementų padėtimi periodinėje lentelėje, leido nustatyti daugybę modelių renkantis katalizatorius. | |||
| 8955. | Pagrindinės sąvokos, susijusios su matavimo priemonėmis | 2,38 MB | |
| Matavimo priemonės skiriasi: pagal metrologinę paskirtį: darbinės ir metrologinės; pagal matų, matavimo priemonių, matavimo įrenginių, matavimo sistemų ir matavimo kompleksų projektą; pagal automatizavimo lygį į neautomatinį, automatinį ir automatinį; pagal standartizacijos lygį į standartinį ir nestandartinį; išmatuotos vertės atžvilgiu į pagrindinę ir pagalbinę. Matavimo priemonių tipas - matavimo priemonių rinkinys, skirtas išmatuoti vieną... | |||
| 5904. | PAGRINDINĖS SIGNALŲ CHARAKTERISTIKOS | 84,87 KB | |
| Elektros ir radijo grandinių teorijos atsiradimas yra neatsiejamai susijęs su praktika: su elektrotechnikos, radijo inžinerijos ir radijo elektronikos formavimusi. Prie šių sričių ir jų teorijų kūrimo prisidėjo daug šalies ir užsienio mokslininkų. | |||
| 19099. | Kultūra, esmė ir pagrindinės savybės | 7,46 KB | |
| Sąvoka kultūra gali apibūdinti žmonijos kultūrą įvairiose šalyse, etnines grupes, socialines profesines grupes arba skirtingų epochų kultūrą, religinę kultūrą, krikščioniškąjį islamo budizmą. Žodis kultūra atėjo pas mus iš lotynų kalba kultūra. Tada žodis kultūra pradėtas vartoti nematerialioje psichinėje dvasinėje žmogaus veikloje. | |||
| 14730. | Pagrindinės elektrinių signalų charakteristikos | 179,62 KB | |
| Periodinio signalo laiko ir spektro vaizdavimas. Matematinis signalo modelis – tai matematinių ryšių sistema, apibūdinanti tiriamą procesą ar reiškinį, pasiskirstymo vektorių funkcijų aprašymas ir pan., naudojant matematinius objektus, leidžiančius daryti išvadas apie signalo charakteristikas. Tam tikros laiko funkcijos signalo aprašymas visiškai nulemia jo savybes. | |||
| 6816. | Pilietybė Rusijos Federacijoje: pagrindinės savybės | 8 KB | |
| Rusijos Federacijos pilietis asmuo, turintis Rusijos pilietybę ir turintis Rusijos pilietybę patvirtinantį dokumentą. Užsienio pilietis Rusijos Federacijoje asmuo, kuris neturi Rusijos pilietybės, bet turi kitos valstybės pilietybės patvirtinimą. Asmuo be pilietybės yra asmuo be pilietybės, kuris nėra Rusijos Federacijos pilietis ir neturi užsienio valstybės pilietybę patvirtinančio dokumento. Rusijos Federacijos pilietybės turinys yra Rusijos Federacijos ir Rusijos Federacijos piliečio abipusių teisių ir pareigų visuma. | |||
| 1584. | Valiutų rinkos samprata ir pagrindinės charakteristikos | 27,93 KB | |
| Tyrimo objektas tai kursinis darbas yra užsienio valiutų rinka. Tyrimo objektas – užsienio valiutų rinka socialinių santykių įgyvendinimo procese. valiutos rinkos keitimo operacija... | |||
| 21648. | 1924 m. SSRS konstitucija, pagrindinės charakteristikos | 25,53 KB | |
| 1924 m. SSRS Konstitucijos rengimas ir priėmimas. Kaip matysime kiek vėliau, kaip tik SSRS kūrimosi metu, diskusijos apie tai, ar reikia Konstitucijos, ar ne, turėjo labai rimtą praktinį pagrindą. Todėl manau, kad mano darbo tikslas yra pačiam suprasti, kaip buvo priimta 1924 m. SSRS Konstitucija, kokie jos bruožai išskyrė ją iš kitų SSRS konstitucijų. | |||
| 6787. | Rusijos konstitucinės sistemos samprata ir pagrindinės ypatybės | 7,54 KB | |
| Konstitucinė santvarka plačiąja prasme – tai visuma ekonominių politinių socialinių teisinių ideologinių visuomeninių santykių, atsirandančių dėl valstybės sandaros aukščiausių valdžios organų organizavimo, žmogaus ir valstybės santykių, taip pat pilietinės visuomenės ir valstybės. .. | |||
| 9085. | Techninės informacijos apdorojimo priemonės. Pagrindinės PC modulių charakteristikos | 180,9 KB | |
| Išorinė asmeninio kompiuterio atmintis Fizinė ir loginė disko struktūra Disko fizinės struktūros formatavimas susideda iš koncentrinių takelių kūrimo diske, kurie savo ruožtu yra suskirstyti į sektorius. Norėdami tai padaryti, formatavimo proceso metu magnetinė disko galvutė tam tikrose disko vietose įdeda takelio ir sektoriaus žymes. Loginė disko struktūra yra sektorių, kurių kiekvienas turi savo serijos numerį, rinkinys. Logiškai skaidydama diskus, OS padalija juos į dvi dalis: 1 Sistemos sritis... | |||
Matavimas yra svarbiausia metrologijos sąvoka. Tai organizuotas žmogaus veiksmas, atliekamas siekiant kiekybinio fizinio objekto savybių pažinimo, empiriškai nustatant bet kurio fizikinio dydžio vertę.
Yra keli matavimų tipai. Klasifikuojant juos dažniausiai vadovaujamasi išmatuoto dydžio priklausomybės nuo laiko pobūdžiu, matavimo lygties tipu, matavimo rezultato tikslumą lemiančiomis sąlygomis ir šių rezultatų išreiškimo būdais.
Pagal išmatuotos vertės priklausomybės nuo laiko pobūdį matavimai skirstomi į:
statinis, kai išmatuota vertė laikui bėgant išlieka pastovi;
dinaminis, kurio metu išmatuota vertė kinta ir laikui bėgant nėra pastovi.
Statiniai matavimai – tai, pavyzdžiui, kūno matmenų, pastovaus slėgio matavimai, dinaminiai – pulsuojančių slėgių, vibracijų matavimai.
Pagal matavimų skaičių jie skirstomi į vienkartinius ir daugkartinius. Vienas matavimas yra matavimas, atliktas vieną kartą. Daugkartinis matavimas yra to paties dydžio fizinio dydžio matavimas, kurio rezultatas gaunamas iš kelių nuoseklių matavimų, tai yra, susidedantis iš kelių pavienių matavimų. Daugkartiniai matavimai atliekami tuo atveju, kai atsitiktinė vieno matavimo paklaidos dedamoji gali viršyti problemos sąlygų reikalaujamą reikšmę. Atliekant eilę nuoseklių individualių matavimų, gaunamas vienas kartotinis matavimas, kurio paklaidą galima sumažinti matematinės statistikos metodais.
Pagal matavimo rezultatų gavimo būdą jie skirstomi į:
netiesioginis;
kaupiamasis;
Bendras.
Tiesioginiai matavimai yra tie, kurių metu norima fizikinio dydžio vertė randama tiesiogiai iš eksperimentinių duomenų. Tiesioginius matavimus galima išreikšti formule Q = X, kur Q yra norima išmatuoto dydžio vertė, o X yra vertė, tiesiogiai gauta iš eksperimentinių duomenų.
Atliekant tiesioginius matavimus, išmatuotam kiekiui atliekamos eksperimentinės operacijos, kurios lyginamos su matu tiesiogiai arba naudojant matavimo priemones, sukalibruotas reikiamais vienetais. Tiesioginių matavimų pavyzdžiai – kūno ilgio matavimas liniuote, masės matavimas naudojant svarstykles ir kt. Tiesioginiai matavimai plačiai taikomi mechanikos inžinerijoje, taip pat technologinių procesų valdymui (matuojant slėgį, temperatūrą).
Netiesioginiai yra matavimai, kurių metu norimas dydis nustatomas pagal žinomą ryšį tarp šio dydžio ir dydžių, kuriems atliekami tiesioginiai matavimai, t.y. Jie matuoja ne tikrąjį nustatomą kiekį, o kitus, kurie yra funkciškai su juo susiję. Matuojamo dydžio reikšmė randama skaičiuojant pagal formulę Q = F(x 1,x 2,...,x n), kur Q – norima netiesiogiai išmatuoto dydžio reikšmė; F yra iš anksto žinoma funkcinė priklausomybė, x 1,x 2,...,x n yra tiesiogiai išmatuotų dydžių reikšmės.
Suminiai – tai vienu metu atliekami kelių to paties pavadinimo dydžių matavimai, kuriuose norimas nustatomas sprendžiant lygčių sistemą, gautą tiesiogiai matuojant įvairias šių dydžių kombinacijas.
Jungtiniai matavimai yra dviejų ar daugiau skirtingų dydžių matavimai, atliekami vienu metu, siekiant nustatyti jų priklausomybes.
Pagal sąlygas, kurios lemia rezultato tikslumą, matavimai skirstomi į tris klases:
išmatuoti didžiausią įmanomą tikslumą, kurį galima pasiekti naudojant dabartinį technologijų lygį. Ši klasė taip pat apima kai kuriuos specialius matavimus, kuriems reikalingas didelis tikslumas;
kontroliniai ir patikros matavimai, kurių paklaida su tam tikra tikimybe neturėtų viršyti tam tikros nurodytos vertės;
techniniai matavimai, kuriuose rezultato paklaida nustatoma pagal matavimo priemonių charakteristikas.
Pagal matavimo rezultatų išreiškimo būdą skiriami absoliutūs ir santykiniai matavimai.
Absoliutūs matavimai yra tie, kurie pagrįsti tiesioginiais vieno ar kelių pagrindinių dydžių matavimais arba fizikinių konstantų verčių naudojimu.
Santykiniai yra kiekio ir to paties pavadinimo kiekio, atliekančio vieneto vaidmenį, santykio matavimai arba kiekio matavimai, palyginti su to paties pavadinimo kiekiu, laikomu pradiniu.
Yra ir kitų matavimų klasifikacijų, pavyzdžiui, pagal ryšį su objektu (kontaktinis ir nekontaktinis), pagal matavimo sąlygas (vienodai tikslūs ir nevienodai tikslūs).
Pagrindinės matavimų charakteristikos yra: matavimo principas, matavimo metodas, paklaida, tikslumas, teisingumas ir patikimumas.
Matavimo principas – fizinis reiškinys arba fizinių reiškinių, kuriais grindžiami matavimai, rinkinys. Pavyzdžiui, kūno svorio matavimas naudojant svėrimą naudojant masei proporcingą gravitaciją, temperatūros matavimas naudojant termoelektrinį efektą.
Šiuo metu visi matavimai, atsižvelgiant į jų įgyvendinimui naudojamus fizikinius dėsnius, yra sugrupuoti į 13 matavimų tipų. Pagal klasifikaciją jiems buvo priskirti dviženkliai kodai matavimų rūšims: geometriniai (27), mechaniniai (28), srautai, talpa, lygis (29), slėgis ir vakuumas (30), fizikiniai ir cheminiai (31), temperatūros ir termofizinių (32), laiko ir dažnių (33), elektrinių ir magnetinių (34), radioelektroninių (35), vibroakustinių (36), optinių (37), jonizuojančiosios spinduliuotės parametrų (38), biomedicinos (39).
Matavimo metodas– principų ir matavimo priemonių naudojimo technikų rinkinys.
Matavimo metodas– metodas arba metodų rinkinys, skirtas išmatuotam kiekiui palyginti su jo vienetu pagal įgyvendintą matavimo principą. Paprastai matavimo metodas nustatomas pagal matavimo priemonių konstrukciją. Matavimo priemonės yra naudojamos techninės priemonės, turinčios standartizuotas metrologines savybes. Įprastų matavimo metodų pavyzdžiai yra šie:
tiesioginio vertinimo metodas – metodas, kai kiekio vertė nustatoma tiesiogiai iš rodomosios matavimo priemonės. Pavyzdžiui, sverti ant svarstyklių arba matuoti slėgį spyruokliniu manometru;
diferencialinis metodas – matavimo metodas, kai išmatuotas dydis lyginamas su vienarūšiu dydžiu, kurio žinoma reikšmė šiek tiek skiriasi nuo išmatuoto dydžio vertės, ir kuriuo matuojamas skirtumas tarp šių dviejų dydžių. Šis metodas gali duoti labai tikslius rezultatus. Taigi, jei skirtumas yra 0,1% išmatuotos vertės ir prietaisas jį įvertina 1% tikslumu, tada norimos vertės matavimo tikslumas bus 0,001%. Pavyzdžiui, lyginant identiškus tiesinius matmenis, kai skirtumas tarp jų nustatomas akies mikrometru, leidžiančiu jį įvertinti dešimtosiomis mikrono dalimis;
nulinio matavimo metodas – lyginimo su matu metodas, kai išmatuoto dydžio ir mato įtakos palyginimo įtaisui gaunamas poveikis prilyginamas nuliui. Matas yra matavimo priemonė, skirta atkurti ir saugoti fizinį dydį. Pavyzdžiui, išmatuoti masę lygių rankų skalėje, naudojant svorius. Tai vienas iš labai tikslių metodų.
palyginimo su matu metodas – matavimo metodas, kai išmatuota vertė lyginama su matu atkuriama reikšme. Pavyzdžiui, išmatuoti nuolatinės srovės įtampą ant kompensatoriaus, lyginant su žinomu įprasto elemento EML. Matavimo rezultatas šiuo metodu arba apskaičiuojamas kaip palyginimui naudojamo mato vertės ir matavimo prietaiso rodmenų suma, arba imamas lygus matavimo vertei. Yra įvairių šio metodo modifikacijų: matavimo pakeitimo būdu (matuojamas dydis pakeičiamas matu, kurio dydžio reikšmė yra žinoma, pvz., sveriant pakaitomis dedant masę ir svorius ant tos pačios svarstyklių lėkštės) ir matavimo metodas sudėjus (matuoto mato vertė papildoma to paties dydžio matu su tokiu skaičiavimu, kad palyginimo įtaisą paveiktų jų suma, lygi iš anksto nustatytai vertei).
Matavimų kokybė pasižymi matavimų tikslumu, patikimumu, teisingumu, konvergencija ir atkuriamumu bei paklaidos dydžiu.
Matavimo klaida– skirtumas tarp matavimo metu gautos vertės ir tikrosios išmatuoto dydžio vertės. Klaida atsiranda dėl matavimo metodų ir prietaisų netobulumo, stebėjimo sąlygų kintamumo, taip pat dėl nepakankamos stebėtojo patirties ar jo pojūčių savybių.
Matavimų tikslumas yra matavimų charakteristika, atspindinti jų rezultatų artumą tikrajai išmatuotos vertės reikšmei. Kiekybiškai tikslumas gali būti išreikštas kaip santykinės paklaidos modulio atvirkštinė vertė.
Teisingas matavimas apibrėžiama kaip matavimo kokybė, atspindinti sisteminių rezultatų klaidų (t. y. tokių paklaidų, kurios išlieka pastovios arba natūraliai kinta pakartotinai matuojant tą patį kiekį) artumą nuliui. Matavimų tikslumas visų pirma priklauso nuo to, kiek tikrasis vieneto, kuriame atliekamas matavimas, dydis skiriasi nuo tikrojo jo dydžio (pagal apibrėžimą), t.y. apie tai, kiek tam tikro tipo matavimams naudotos matavimo priemonės buvo teisingos (teisingi).
Svarbiausia matavimų kokybės charakteristika yra jų patikimumas. Jis apibūdina pasitikėjimą matavimo rezultatais ir suskirsto juos į dvi kategorijas: patikimus ir nepatikimus, priklausomai nuo to, ar žinomos ar nežinomos tikimybinės jų nuokrypių nuo atitinkamų dydžių verčių charakteristikos. Matavimo rezultatai, kurių patikimumas nežinomas, nėra vertingi ir kai kuriais atvejais gali būti klaidingos informacijos šaltinis.
Konvergencija(pakartojamumas) – tai matavimų kokybė, atspindinti to paties parametro matavimų, pakartotinai atliktų tomis pačiomis matavimo priemonėmis, tuo pačiu metodu tomis pačiomis sąlygomis ir tokiu pat rūpestingumu, rezultatų artumą.
Atkuriamumas– tai matavimų kokybė, atspindinti to paties parametro matavimų, atliktų skirtingomis sąlygomis (skirtingu laiku, skirtingomis priemonėmis ir pan.), rezultatų artumą vienas kitam.
Kaip minėta pirmiau, matavimas yra procesas, kurio metu eksperimentiškai gaunama viena ar daugiau dydžio verčių, kurias galima pagrįstai priskirti jam. Matuojamo dydžio reikšmė priklauso nuo matavimo sąlygų, pasirinkto metodo, matavimo priemonės tipo ir kt.
Pagrindinės matavimo charakteristikos apima matavimo principus, matavimo metodus ir matavimo tikslumą.
Matavimo principas yra fizikinis reiškinys (efektas), kuris sudaro pagrindą matavimams naudojant vienokią ar kitokią matavimo priemonę.
Daugybė fizinių efektų, kuriuos mokslininkai atrado tyrimų metu, naudojami kaip matavimo principai. Pavyzdžiui, naudojant Doplerio efektą greičiui matuoti; Holo efekto taikymas indukcijai matuoti magnetinis laukas; gravitacijos panaudojimas masei matuoti sveriant.
Skirtingų matavimo principų taikymo pavyzdžiai yra pjezoelektrinis efektas, termoelektrinis efektas ir fotoelektrinis efektas.
Pjezoelektrinis efektas susideda iš EML atsiradimo ant kai kurių kristalų (kvarco, turmalino, dirbtinių pjezoelektrinių medžiagų) paviršiaus (paviršių), veikiant išorinėms jėgoms. Didžiausią panaudojimą matavimams rado kvarcas ir pjezokeramika (pavyzdžiui, bario titanatas), pasižymintys gana dideliu mechaniniu atsparumu ir temperatūros stabilumu (kvarcas iki 200°C temperatūros; pjezokeramika – iki 115°C).
Pjezoelektrinis efektas grįžtamasis: pjezoelektriniam kristalui pritaikytas emf sukelia jo paviršiaus mechaninį įtempimą. Matavimo keitikliai, pagrįsti pjezoelektriniu efektu, yra savaime generuojami dinaminiams matavimams.
Termoelektrinis efektas naudojami temperatūros matavimams, ir naudojami du pagrindiniai šio efekto realizavimo būdai.
Pirmuoju atveju naudojama savybė keisti metalų ir puslaidininkių elektrinę varžą keičiantis temperatūroms. Dažnai naudojami metalai yra varis (įprastiniams matavimams) ir platina (didelio tikslumo matavimams). Atitinkamas matavimo keitiklis vadinamas termistoriumi. Jautrūs puslaidininkinio keitiklio elementai – termistorius – gaminami iš įvairių metalų oksidų. Kylant temperatūrai, termistoriaus varža mažėja, o termistoriaus – didėja. Termistorių varžos priklausomybė nuo temperatūros pokyčių yra netiesinė, varinių termistorių – tiesinė, platininių – apytiksliai kvadratiniu trinario.
Platininiai termistoriai leidžia matuoti temperatūrą nuo -200°C iki +1000°C.
Matavimo tikslais naudojami išoriniai ir vidiniai fotoelektriniai efektai. Išorinis fotoelektrinis efektas atsiranda vakuuminiame cilindre, turinčiame anodą ir fotokatodą. Kai apšviečiamas fotokatodas, šviesos fotonų įtakoje išspinduliuojami elektronai. Kai tarp anodo ir fotokatodo yra elektros įtampa, fotokatodo skleidžiami elektronai sudaro elektros srovę, vadinamą fotosrove.
Tokiu būdu šviesos energija paverčiama elektros energija.
Matavimo metodas– tai metodų (metodų) rinkinys, naudojamas lyginant išmatuotą dydį su jo vienetu (arba skale) pagal pasirinktą matavimo principą.
Matavimo metodai skirstomi į tiesioginio vertinimo ir palyginimo su priemone metodus. Lyginimo su matu metodai skirstomi į kontrastinį, diferencinį, nulinį, pakeitimo ir sutapimo metodus.
Tiesioginio vertinimo metodas susideda iš fizikinio dydžio vertės nustatymo naudojant tiesioginio veikimo matavimo prietaiso skaitymo įtaisą. Pavyzdžiui, išmatuoti įtampą voltmetru. Šis metodas yra labiausiai paplitęs, tačiau jo tikslumas priklauso nuo matavimo priemonės tikslumo.
Palyginimo metodas su matu naudoja išmatuotos vertės palyginimą su matavimo atkurta verte. Matavimo tikslumas gali būti didesnis nei tiesioginio vertinimo tikslumas.
Kontrastinis metodas yra pagrįstas tuo pačiu metu išmatuojamo ir atkuriamo dydžio įtaka palyginimo įtaisui, kurio pagalba nustatomas santykis tarp dydžių. Pavyzdžiui, svorio matavimas naudojant svirties svarstykles ir svarmenų rinkinį.
Kada diferencinis metodas matavimo prietaisą veikia skirtumas tarp išmatuoto kiekio ir žinomo kiekio, atkuriamo matu. Šiuo atveju išmatuotos vertės subalansavimas su žinoma nėra visiškai atliktas. Pavyzdžiui, nuolatinės srovės įtampos matavimas naudojant atskirą įtampos daliklį, atskaitos įtampos šaltinį ir voltmetrą.
Naudojant nulinis metodas gautas abiejų dydžių įtakos palyginimo įtaisui efektas priartinamas iki nulio, kurį fiksuoja itin jautrus prietaisas – nulinis indikatorius. Pavyzdžiui, rezistoriaus varžos matavimas naudojant keturių pečių tiltelį, kuriame nežinomos varžos rezistoriaus įtampos kritimas subalansuojamas žinomos varžos rezistoriaus įtampos kritimu.
Pakeitimo metodas yra pagrįstas išmatuoto kiekio ir žinomo dydžio pakaitomis prijungimu prie įrenginio įvesties, o pagal du prietaiso rodmenis įvertinama išmatuoto dydžio vertė, o tada, pasirinkus žinomą dydį, užtikrinama, kad abu rodmenys sutampa.
Taikant šį metodą galima pasiekti aukštą matavimo tikslumą, tiksliai matuojant žinomą kiekį ir didelį prietaiso jautrumą. Pavyzdžiui, tiksliai išmatuojant mažą įtampą naudojant labai jautrų galvanometrą, prie kurio pirmiausia prijungiamas nežinomos įtampos šaltinis ir nustatomas rodyklės nuokrypis, o po to naudojant reguliuojamą žinomos įtampos šaltinį – toks pat įtampa. rodyklė pasiekiama. Šiuo atveju žinoma įtampa yra lygi nežinomai.
Atsitiktinumo metodu nustatyti skirtumą tarp išmatuotos vertės ir matu atkuriamos vertės, naudojant skalės ženklų arba periodinių signalų sutapimą. Pavyzdžiui, matuojant detalės sukimosi greitį naudojant mirksinčią stroboskopinę lemputę: stebint žymės padėtį ant besisukančios dalies žibinto mirksėjimo momentais, detalės greitis nustatomas pagal žinomą blyksnių dažnį ir ženklo poslinkis.
Privalomųjų reikalavimų ir taisyklių laikymosi patikra vykdoma valstybinės privalomųjų reikalavimų laikymosi kontrolės (priežiūros) būdu.
Matavimų tikslumas nustatomas pagal matavimo paklaidos artumą nuliui, t.y. matavimo rezultatų artumas tikrajai dydžio vertei.
Tikroji išmatuoto dydžio vertė– fizinio dydžio, kuris idealiai kiekybine ir kokybine prasme atspindėtų atitinkamą objekto savybę, vertė.
Tikroji išmatuoto kiekio vertė yra eksperimentiškai rasta vertė, kuri yra taip artima tikrajai vertei, kad ją galima naudoti tam tikram tikslui.
Dėl mūsų jutimo organų (regos ir klausos) savybių bei naudojamų matavimo priemonių netobulumo neįmanoma nustatyti tikrosios išmatuotos vertės vertės.
Galima tik nurodyti, kad jis yra tarp dviejų reikšmių, iš kurių viena imama su trūkumu, o kita su pertekliumi. Kuo šios vertės arčiau viena kitos, tuo mažesnis jų skirtumas, tuo tikslesnis matavimas.
Matavimo paklaida gali būti kiekybiškai išreikšta išmatuotos vertės vienetais arba matavimo rezultato paklaidos atžvilgiu, tačiau matavimų tikslumas negali būti nustatytas tiesiogiai iš matavimo rezultatų. Todėl jie dažniausiai kalba apie aukštą (vidutinį, žemą) matavimo tikslumą kokybine prasme.
Štai kodėl patogiau kiekybiškai įvertinti matavimų tikslumą naudojant paklaidą.
Taigi eksperimentuotojo užduotis yra ne tik nustatyti tą ar kitą norimą reikšmę, bet ir nurodyti, koks yra šios reikšmės nustatymo tikslumas, arba, kitaip tariant, kokia leistina paklaidos reikšmė.
Išskiriamos šios pagrindinės matavimo charakteristikos:
1) matavimų atlikimo būdas;
2) matavimo principas;
3) matavimo paklaida;
4) matavimo tikslumas;
5) matavimų teisingumas;
6) matavimų patikimumas.
Matavimo metodas- tai metodas arba metodų rinkinys, kuriuo matuojamas tam tikras dydis, t. y. išmatuoto dydžio palyginimas su jo matu pagal priimtą matavimo principą.
Yra keli matavimo metodų klasifikavimo kriterijai.
1. Pagal norimos išmatuoto dydžio vertės gavimo būdus išskiriami:
1) tiesioginis metodas (atliekamas naudojant tiesioginius, tiesioginius matavimus);
2) netiesioginis metodas.
2. Pagal matavimo metodus yra:
1) kontaktinio matavimo metodas;
2) bekontakčio matavimo metodas.
Kontaktinio matavimo metodas remiantis tiesioginiu bet kurios matavimo prietaiso dalies kontaktu su išmatuojamu objektu.
At bekontakčio matavimo metodas matavimo prietaisas tiesiogiai nesiliečia su matuojamu objektu.
3. Pagal dydžio palyginimo su matu būdus išskiriami:
1) tiesioginio vertinimo metodas;
2) palyginimo su jo vienetu metodas.
Tiesioginio vertinimo metodas yra pagrįstas matavimo prietaiso, rodančio išmatuoto dydžio vertę, naudojimu.
Palyginimo metodas su matu remiantis matavimo objekto palyginimu su jo matu.
Matavimo principas– tai tam tikras fizikinis reiškinys arba jų kompleksas, kuriuo grindžiamas matavimas.
Matavimo klaida yra skirtumas tarp dydžio matavimo rezultato ir tikrosios (faktinės) šio dydžio vertės.
Matavimų tikslumas– tai charakteristika, išreiškianti matavimo rezultatų atitikimo tikrajai išmatuoto dydžio vertei laipsnį.
Teisingas matavimas– tai kokybinė matavimo charakteristika, kuri nustatoma pagal tai, kiek nuliui artima nuolatinės ar fiksuotos paklaidos reikšmė, kuri kinta atliekant pakartotinius matavimus (sisteminė paklaida).
Matavimų patikimumas yra charakteristika, lemianti gautų matavimo rezultatų pasitikėjimo laipsnį.
4 Fizinio dydžio samprata Fizinių vienetų sistemų reikšmė
Fizinis dydis – tai bent dviejų mokslų samprata: fizikos ir metrologijos. Pagal apibrėžimą fizikinis dydis yra tam tikra objekto ar proceso savybė, bendra daugeliui objektų kokybiniais parametrais, tačiau skiriasi kiekybine (kiekvienam objektui individuali). Yra daugybė klasifikacijų, sukurtų pagal įvairius kriterijus. Pagrindiniai skirstomi į:
1) aktyvieji ir pasyvieji fizikiniai dydžiai – skirstomi matavimo informacijos signalų atžvilgiu. Be to, pirmieji (aktyvūs) šiuo atveju yra dydžiai, kurie, nenaudojant pagalbinių energijos šaltinių, gali būti paversti matavimo informacijos signalu. O antrasis (pasyvus) – tai dydžiai, kuriems būtina naudoti pagalbinius energijos šaltinius, sukuriančius matavimo informacijos signalą;
2) adityviniai (arba ekstensyvūs) ir nepridūs (arba intensyvūs) fizikiniai dydžiai – skirstant pagal adityvumą. Manoma, kad pirmieji (priediniai) dydžiai matuojami dalimis, be to, juos galima tiksliai atkurti naudojant daugiareikšmį matą, pagrįstą atskirų matų dydžių suma. Tačiau antrieji (nepridedami) dydžiai nėra tiesiogiai matuojami, nes jie paverčiami tiesioginiu kiekio matavimu arba matavimu netiesioginiai matavimai. 1791 m. Prancūzijos nacionalinė asamblėja priėmė pirmąją fizikinių dydžių vienetų sistemą. Tai buvo metrinė matavimų sistema. Jame buvo: ilgio, ploto, tūrio, talpos ir svorio vienetai. Ir jie buvo pagrįsti dviem dabar gerai žinomais vienetais: metras ir kilogramas.
Mokslininkas savo metodiką grindė trimis pagrindiniais nepriklausomais dydžiais: mase, ilgiu, laiku. Matematikas kaip pagrindinius šių dydžių matavimo vienetus paėmė miligramą, milimetrą ir sekundę, nes visus kitus matavimo vienetus galima lengvai apskaičiuoti naudojant mažiausius. Taigi dabartiniame vystymosi etape išskiriamos šios pagrindinės fizikinių dydžių vienetų sistemos:
1) GHS sistema(1881);
2) MKGSS sistema(XIX a. pabaiga);
3) MKSA sistema(1901 m.)
Prieš suvokiant bet kokių reiškinių esmę, patogu pirmiausia juos sutvarkyti, t.y. klasifikuoti.
Matmenys skirstomi į matavimų tipai- matavimo zonos dalis,
turintis savo ypatybes ir pasižymintis išmatuotų verčių vienalytiškumu, ir matavimo metodai- matavimo lauko dalis, kurią sudaro principų ir matavimo priemonių naudojimo metodų skirtumai.
- Matavimų tipų klasifikacija
Matavimų tipai gali būti klasifikuojami pagal įvairius klasifikavimo kriterijus, kurie apima: fizikinio dydžio skaitinės vertės nustatymo būdą, stebėjimų skaičių, išmatuoto dydžio priklausomybės nuo laiko pobūdį, išmatuotų momentinių verčių skaičius tam tikru laiko intervalu, rezultatų tikslumą lemiančios sąlygos, matavimo rezultatų išraiškos metodas (2.1 pav.).
Autorius fizikinio dydžio skaitinės reikšmės radimo būdas matavimai skirstomi į šiuos tipus: tiesioginius, netiesioginius, kaupiamuosius ir jungtinius.
Tiesioginis matavimas vadinamas matavimu, kurio metu išmatuoto fizikinio dydžio vertė randama tiesiogiai iš eksperimentinių duomenų. Tiesioginiams matavimams būdinga tai, kad eksperimentas kaip matavimo procesas atliekamas su pačiu išmatuotu kiekiu, o tai reiškia tą ar kitą
kitas jo pasireiškimas. Tiesioginiai matavimai atliekami naudojant įrankius, skirtus šiems dydžiams matuoti. Išmatuoto kiekio skaitinė vertė apskaičiuojama tiesiogiai pagal matavimo prietaiso rodmenis. priemonės, kiekiai. Tiesioginių matavimų pavyzdžiai: srovės matavimas ampermetru; įtampa - kompensatorius; masė – ant svertinių svarstyklių ir kt.
Ryšys tarp išmatuotos vertės X ir matavimo rezultato Y tiesioginio matavimo metu apibūdinamas lygtimi X = Y, t.y. laikoma, kad išmatuoto dydžio vertė yra lygi gautam rezultatui.
Deja, tiesioginis matavimas ne visada įmanomas. Kartais tinkamos matavimo priemonės nėra po ranka arba ji yra nepatenkinama.
tikslumu arba net dar visai nesukurta. Tokiu atveju turite naudoti netiesioginį matavimą.
Netiesioginiai matavimai Tai yra matavimai, kurių metu pageidaujamo dydžio vertė randama remiantis žinomu šio dydžio ir dydžių, kuriems taikomas tiesioginis matavimas, ryšiu. Atliekant netiesioginius matavimus matuojamas ne tikrasis nustatomas dydis, o kiti su juo funkciškai susiję dydžiai. Netiesiogiai išmatuoto kiekio vertė X rasta skaičiuojant pagal formulę
X =
F(Y1
,
Y2
, … ,
Yn),
Kur Y1, Y2,…Yn- dydžių vertės, gautos atliekant tiesioginius matavimus.
Netiesioginio matavimo pavyzdys yra elektrinės varžos nustatymas naudojant ampermetrą ir voltmetrą. Čia, atliekant tiesioginius matavimus, randamos įtampos kritimo vertės U apie pasipriešinimą R ir srovės aš per jį, o norima varža R randama pagal formulę
R =
U/
aš .
Išmatuotos vertės apskaičiavimo operacija gali būti atliekama rankiniu būdu arba naudojant įrenginyje esantį skaičiavimo įrenginį.
Tiesioginiai ir netiesioginiai matavimai šiuo metu plačiai naudojami praktikoje ir yra labiausiai paplitę matavimų tipai.
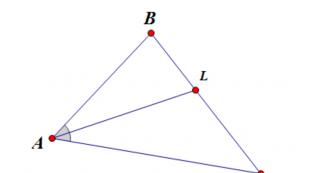
Suvestiniai matavimai- tai kelių to paties pavadinimo dydžių matavimai, atliekami vienu metu, kai norimos dydžių reikšmės randamos sprendžiant lygčių sistemą, gautą tiesiogiai matuojant įvairius šių dydžių derinius.  Pavyzdžiui, norėdami nustatyti trikampiu sujungtų rezistorių varžos vertes (2.2 pav.), išmatuokite varžą kiekviename kampe.
Pavyzdžiui, norėdami nustatyti trikampiu sujungtų rezistorių varžos vertes (2.2 pav.), išmatuokite varžą kiekviename kampe.
trikampio viršūnių porą ir gaukite lygčių sistemą  ;
; ;
; .
.
Iš šios lygčių sistemos sprendimo gaunamos varžos vertės
 ,
,  ,
,  ,
,
Kur.
Sąnarių išmatavimai- tai dviejų ar daugiau skirtingų dydžių matavimai, atlikti vienu metu X1, X2,…,Xn, kurių reikšmės randamos sprendžiant lygčių sistemą:
Fi(X1, X2, … ,Xn; Yi1, Yi2, … ,Yim) = 0,
Kur i = 1, 2, …, m>
n; Yi1, Yi2, … ,Yim- tiesioginių ar netiesioginių matavimų rezultatai; X1, X2, … ,Xn- reikalingų kiekių vertės.
Pavyzdžiui, ritės induktyvumas L = L0×
(1 +
w2
×
C×
L0), Kur L0- dažnio induktyvumas w = 2
×
p×
f linkęs į nulį; C - perjungimo talpa. Vertybės L0 Ir SU negali būti nustatyta tiesioginiais ar netiesioginiais matavimais. Todėl paprasčiausiu atveju matuojame L1 adresu w1
, ir tada L2 adresu w2
ir sudaryti lygčių sistemą:
L1 = L0×
(1 +
w1
2
×
C×
L0);
L2 = L0×
(1 +
w2
2
×
C×
L0),
kurią išsprendę, randame reikiamas induktyvumo reikšmes L0 ir konteineriai SU: ;
;  .
.
Suminiai ir jungtiniai matavimai yra netiesioginių matavimų apibendrinimas kelių dydžių atveju.
Agregatų ir jungčių matavimų tikslumui padidinti pateikiama sąlyga m ³ n, t.y. lygčių skaičius turi būti didesnis arba lygus reikiamų dydžių skaičiui. Gauta nenuosekli lygčių sistema išsprendžiama mažiausių kvadratų metodu.
Autorius matavimo stebėjimų skaičius skirstomi į (2.1 pav.):
- įprasti matavimai – matavimai atliekami vienu stebėjimu;
- statistiniai matavimai - matavimai su daugybe stebėjimų.
Stebėjimas matavimo metu yra eksperimentinė operacija, atliekama matavimo proceso metu, dėl kurios viena vertė gaunama iš dydžių verčių grupės, kuri kartu apdorojama, kad būtų gauti matavimo rezultatai.
Stebėjimo rezultatas yra dydžio, gauto iš atskiro stebėjimo, rezultatas.
Autorius išmatuoto dydžio priklausomybės nuo laiko pobūdis matmenys skirstomi:
- statinis, kai išmatuota vertė matavimo proceso metu laikui bėgant išlieka pastovi;
- dinaminis, kuriame išmatuota vertė kinta matavimo proceso metu ir laikui bėgant nėra pastovi.
Atliekant dinaminius matavimus, norint gauti matavimo rezultatą, reikia atsižvelgti į šį pokytį. O norint įvertinti dinaminių matavimų rezultatų tikslumą, būtina išmanyti matavimo priemonių dinamines savybes.
Autorius išmatuotų momentinių verčių skaičius tam tikru laiko intervalu išmatavimai skirstomi į diskretus Ir tęstinis(analoginis).
Diskretieji matavimai yra matavimai, kai per tam tikrą laiko intervalą išmatuotų momentinių verčių skaičius yra baigtinis.
Nuolatiniai (analoginiai) matavimai yra matavimai, kai per tam tikrą laiko intervalą išmatuotų momentinių verčių skaičius yra begalinis.
Pagal sąlygas, lemiančias rezultatų tikslumą, išmatavimai yra:
- didžiausias įmanomas tikslumas, pasiekiamas naudojant esamą technologijos lygį;
- kontroliniai ir patikros testai, kurių paklaida neturėtų viršyti
tam tikra nurodyta vertė;
- techninė, kurioje rezultato paklaidą lemia matavimo priemonių charakteristikos.
Pagal matavimo rezultatų išreiškimo būdą atskirti absoliučiuosius ir santykinius matavimus.
Absoliutūs išmatavimai- matavimai, pagrįsti tiesioginiais vieno ar kelių pagrindinių dydžių matavimais ir (arba) fizikinių konstantų verčių naudojimu.
Santykiniai išmatavimai- išmatuoti kiekio santykį su to paties pavadinimo kiekiu, kuris atlieka vieneto vaidmenį, arba išmatuoti kiekį, palyginti su to paties pavadinimo kiekiu, kuris laikomas pradiniu.
2.2. Matavimo metodai ir jų klasifikacija
Visi matavimai gali būti atliekami įvairiais metodais. Išskiriami šie pagrindiniai matavimo metodai: tiesioginio vertinimo metodas Ir palyginimo metodaicmatuoti .
2.2.1. Tiesioginio vertinimo metodas pasižymi tuo, kad išmatuoto dydžio vertė nustatoma tiesiogiai iš matavimo prietaiso skaitymo įrenginio, prieš tai sukalibruoto išmatuoto dydžio vienetais. Šis metodas yra pats paprasčiausias, todėl plačiai naudojamas matuojant įvairius dydžius, pvz.: kūno svorį matuojant spyruoklinėmis svarstyklėmis, elektros srovę matuojant ampermetru, fazių skirtumą skaitmeniniu fazių matuokliu ir kt. 
Funkcinė matavimo schema naudojant tiesioginio vertinimo metodą parodyta fig. 2.3.
Tiesioginio vertinimo įrenginiuose visada yra matavimo keitiklis, kuris išmatuotą dydį paverčia kitu, kurį gali palyginti stebėtojas arba automatinis prietaisas. Taigi rodyklėse išmatuota vertė paverčiama judančios dalies sukimosi kampu, pažymėtu rodykle. Pagal rodyklės padėtį, t.y. Palyginus sukimosi kampą su skalės padalomis, randama išmatuoto dydžio reikšmė. Tiesioginio vertinimo instrumentų matas yra skaitymo įrenginio skalės padalijimas. Jie dedami ne savavališkai, o remiantis prietaiso kalibravimu. Tiesioginio vertinimo prietaiso kalibravimas susideda iš to, kad į jo įvestį iš matavimo įvedama tam tikro dydžio vertė ir pažymimas prietaiso rodmuo. Tada šiam rodmeniui priskiriama žinomo dydžio reikšmė. Taigi skaitymo įrenginio skalės skyriai yra tarsi tikro fizinio dydžio vertės pakaitalas („pirštų atspaudai“), todėl gali būti tiesiogiai naudojami prietaiso išmatuotų dydžių verčių paieškai. . Vadinasi, visi tiesioginio vertinimo prietaisai iš tikrųjų įgyvendina lyginimo principą fiziniai dydžiai. Tačiau šis palyginimas yra daugialaikis ir vykdomas netiesiogiai, naudojant tarpinę priemonę – skaitymo įrenginio skalės padalos.
2.2.2. Palyginimo su priemone metodai - matavimo metodai, kai žinomas dydis lyginamas su dydžiu, atkuriama matu. Šie metodai yra tikslesni nei tiesioginis vertinimo metodas, tačiau yra šiek tiek sudėtingi. Lyginimo su matu metodų grupė apima šiuos metodus: opozicija, nulis, diferencialas, sutapimas ir pakaitalas.
Apibrėžianti charakteristika palyginimo metodai yra tai, kad kiekvieno matavimo eksperimento procese yra lyginami du vienarūšiai vienas nuo kito nepriklausomi dydžiai - žinomas (atkuriamas matas) ir išmatuotas. Matuojant palyginimo metodais, naudojami tikri fiziniai matai, o ne jų „atspaudai“.
Palyginimas gali būti vienu metu kai matas ir matuojamas dydis matavimo prietaisą veikia vienu metu, ir daugialaikis, kai matuojamo dydžio ir mato poveikis matavimo prietaisui yra atskirtas laike. Be to, galima palyginti tiesioginis Ir netiesioginis. Pirmuoju atveju išmatuotas dydis ir matas tiesiogiai veikia palyginimo įrenginį, o antruoju – per kitus dydžius, kurie vienareikšmiškai susiję su žinomais ir išmatuotais dydžiais.
Lyginimas vienu metu paprastai atliekamas naudojant metodus opozicijos, nulis, diferencialas Ir sutapimų, ir daugialaikis - metodas pakeitimas.
Kontrastinis metodas- palyginimo su matu metodas, kai išmatuotas dydis ir matu atkuriamas kiekis vienu metu veikia palyginimo įrenginį, kurio pagalba nustatomas šių dydžių santykis. Opozicijos metodo funkcinė diagrama parodyta fig. 2.4.
Taikant šį metodą, išmatuotas dydis X ir matas X0 veikia dvi palyginimo įrenginio įvestis. Gautas smūgio efektas nustatomas pagal šių reikšmių skirtumą, t.y. e = X - X0 ir pašalinamas iš palyginimo įrenginio skaitymo įrenginio. Matavimo rezultatas randamas kaip
Y = X0 + e.
Šis metodas yra patogus, jei yra tiksli daugiareikšmė priemonė ir paprasta 
palyginimo įrenginiai. Šio metodo pavyzdys yra apkrovos svėrimas ant lygių svirčių svarstyklių, išmatuotos masės ir svorių subalansavimas ant dviejų svarstyklių ir visiškas svarstyklių subalansavimas. Šiuo atveju išmatuota masė apibrėžiama kaip ją balansuojančių svorių masės ir skalės rodmenų suma. Kontrastinis metodas leidžia žymiai sumažinti įtakojančių dydžių įtaką matavimo rezultatui, nes pastarieji daugiau ar mažiau vienodai iškraipo signalus tiek išmatuoto dydžio konversijos grandinėje, tiek matavimo atkuriamo dydžio konversijos grandinėje. . Palyginimo įrenginio skaitymo įrenginys reaguoja į signalų skirtumą, dėl to šie iškraipymai vienas kitą tam tikru mastu kompensuoja. Šis metodas taip pat naudojamas matuojant EML, įtampą, srovę ir varžą.
Nulinis metodas yra kontrastinio metodo tipas, kai gaunamas dydžių įtakos palyginimo įtaisui poveikis sumažinamas iki nulio. Nulinio matavimo metodo funkcinė diagrama parodyta fig. 2.5.
Čia išmatuotas dydis X ir matas X0 veikia dvi lyginamojo matavimo prietaiso įvestis. Gautas smūgio efektas nustatomas pagal šių reikšmių skirtumą, t.y. e = X - X0. Pakeitus matu atkuriamą reikšmę (paveiksle tai schematiškai pažymėta rodykle), e reikšmę galite perkelti į 0. Ši aplinkybė nurodoma nuliniu indikatoriumi. Jei e = 0, tai X = Xo, Y matavimo rezultatas yra gauta reikšmė  priemones, t.y. Y = X0.
priemones, t.y. Y = X0.
Kadangi nulinį indikatorių veikia reikšmių skirtumas, jo matavimo ribą galima pasirinkti mažesnę, o jautrumą – didesnį nei prietaiso, skirto X matuoti tiesioginio vertinimo metodu. Dviejų dydžių lygybės nurodymo tikslumas gali būti labai didelis. Ir tai padidina matavimo tikslumą. Matavimo taikant nulinį metodą paklaida nustatoma pagal matavimo paklaidą ir nulio indikacijos paklaidą. Antrasis komponentas paprastai yra daug mažesnis nei pirmasis, praktiškai matavimo tikslumas nuliniu metodu yra lygus matavimo tikslumui.
Nulinio matavimo metodų pavyzdžiai: masės matavimas ant lygių svirties skalių, išmatuotą masę ir svorius subalansuojant ant dviejų svarstyklių ir visiškai subalansuojant svarstykles, arba įtampos matavimas kompensuojant ją etaloninio šaltinio įtampa (abiem atvejais). atliekamas tiesioginis palyginimas); taip pat tilto elektrinės varžos matavimas su visišku jo balansavimu (netiesioginis palyginimas).
Taikant nulinio matavimo metodą, privaloma naudoti daugiareikšmes priemones. Tokių priemonių tikslumas visada yra prastesnis nei vienareikšmių, be to, mes galime ir neturėti mato kintamo dydžio. Šiuo atveju nulinis metodas netaikomas.
Diferencialinis metodas yra palyginimo su matu metodas, kai matavimo prietaisas (būtinai lyginamasis prietaisas) yra veikiamas skirtumo tarp išmatuotos vertės ir žinomos vertės, kurią atkuria matas, ir šis skirtumas ne sumažinamas iki nulio, o išmatuojamas. tiesioginio veikimo matavimo prietaisu.
Fig. 2.6 paveiksle parodyta diferencialinio metodo funkcinė diagrama.
Čia matas turi pastovią reikšmę X0, skirtumą tarp išmatuotos reikšmės X ir mato X0, t.y. e = X - X0, nėra nulis ir yra matuojamas matavimo prietaisu. Matavimo rezultatas randamas kaip
Y = X0 + e. 
Tai, kad čia matavimo prietaisas matuoja ne visą X reikšmę, o tik jos dalį e, leidžia sumažinti matavimo prietaiso paklaidos įtaką matavimo rezultatui, o kuo mažesnis skirtumas e, tuo mažesnė įtaka. matavimo prietaiso klaidą.
Iš tiesų, matuojant įtampą U = 97 V tiesioginio vertinimo voltmetru, kurio matavimo riba yra 100 V, o šios įtampos santykinė matavimo paklaida yra 1% (0,01), gauname absoliučią matavimo paklaidą D1 = 97 × 0,01 = 0,97 » 1 V Jei išmatuosime šią įtampą diferencinis metodas naudojant etaloninį įtampos šaltinį U0 = 100 V, tada įtampos skirtumą U - U0 = (97 - 100)V = - 3 V galime išmatuoti voltmetru, kurio matavimo riba yra tik 3 V. Tegul tai matuojant santykinę paklaidą įtampa taip pat turi būti lygi 1%. Taip gaunama absoliuti 3 V įtampos matavimo paklaida: D2 = 3 × 0,01 = 0,03 V. Jei ši paklaida sumažinama iki išmatuotos įtampos U, gauname santykinę įtampos matavimo paklaidą: D2/U = 0,03/97 » 0, 0003 (0,03 proc.), t.y. maždaug 30 kartų mažiau nei matuojant įtampą U tiesioginio įvertinimo metodu. Toks matavimo tikslumo padidėjimas atsirado todėl, kad pirmuoju atveju prietaisas išmatavo beveik visą vertę su 1% santykine paklaida, o antruoju atveju buvo išmatuota ne visa vertė, o tik 1/30 jos.
Atliekant šiuos skaičiavimus nebuvo atsižvelgta į matavimo rezultate visiškai įtrauktą matavimo paklaidą. Vadinasi, esant nedideliam skirtumui e, matavimo tikslumas diferencialiniu metodu artėja prie matavimo tikslumo taikant nulinį metodą ir nustatomas tik pagal matavimo paklaidą. Be to, taikant diferencialinį metodą nereikia matuoti kintamo dydžio.
Aukščiau pateiktame diferencinės įtampos matavimo pavyzdyje buvo naudojamas tiesioginis palyginimas.
Kitas diferencialinio matavimo metodo pavyzdys – rezistoriaus varžos nuokrypio nuo vardinės vertės nustatymas nesubalansuotu (procentiniu) tilteliu (čia įgyvendinamas netiesioginis palyginimas).
Atitikties metodas(arba nonjero metodas) – tai palyginimo su matu metodas, kai skirtumas tarp išmatuoto kiekio ir matu atkuriamos reikšmės matuojamas naudojant skalės žymų arba periodinių signalų sutapimą.
Šis metodas taikomas tais atvejais, kai išmatuotas dydis yra mažesnis už tam tikro mato dalybos reikšmę. Šiuo atveju naudojami du matai su skirtingomis padalijimo kainomis, kurios skiriasi įvertinto imčių skaitmens dydžiu.
Turėkime vieną kalibruotą matą su padalijimo kaina Dxk1 ir išmatuotas kiekis Dx, kuri yra mažesnė už padalijimo kainą. Tokiu atveju naudokite antrąjį matą su padalijimo kaina Dxk2. Taigi, jei reikia padidinti jautrumą P kartų, tada santykiai tarp jų įgis formą
Dxk2 =Dxk1×( 1 -
1/
n).
Visų pirma, kai n = 10 Dxk2 = 0,9×
Dxk1.
Išmatuotas kiekis Dx nustatykite tarp nulinių matų ženklų ir suraskite skaičių Nx, lygus sutampančių matų padalijimų skaičiui (2.7 pav.). Šiuo atveju ryšys galioja Nx×
Dxk1 =Dx+Nx×
Dxk2, kur
Dx = Nx × (Dxk1 - Dxk2) = Nx × (Dxk1 - 0,9 × Dxk1) = Nx × 0,1 × Dxk1.
Sutapimo matavimo pavyzdys yra detalės ilgio matavimas naudojant nonijinį apkabą; kitas pavyzdys – detalės sukimosi greičio matavimas naudojant mirksinčią stroboskopinę lemputę: stebint besisukančios dalies ženklo padėtį, kai lemputė mirksi, detalės greitis nustatomas pagal blyksnių dažnį ir ženklo poslinkį. Nonjero metodas taip pat plačiai naudojamas matuojant dviejų artimų dažnių laiko intervalus (tvinkus) ir kitais atvejais. 
Įrenginio, veikiančio sutapimo metodu su mastelio transformacija tik matu atkuriamos reikšmės, funkcinė diagrama parodyta Fig. 2.8. Čia vienos vertės mato reikšmė X0 yra keičiama skalėje, kad būtų gautos reikšmės n1X0, n2X0, … njX0, … nkX0. Šios vertės pateikiamos k palyginimo prietaisams, o išmatuota vertė X. Jiems taip pat taikomas loginis įtaisas nurodo palyginimo įrenginio, kuriam X yra njX0 = min, numerį ir pagal apytikslį ryšį X = njX0 nustato išmatuotą vertę. Šis matavimo metodas taip pat buvo pritaikytas skaitmeniniuose prietaisuose, kurie matuoja kampinius ir tiesinius poslinkius. Sutapimo metodas reikalauja, kad būtų daugiareikšmiai matai arba mastelio keitikliai, kurių dydis ir dydis yra atkuriami pagal priemonę. Todėl į matavimo technologija jis naudojamas palyginti retai.
Pakeitimo metodas yra palyginimo su matu metodas, kai išmatuotas dydis pakeičiamas žinomu dydžiu, atkuriamu matu.
Pakeitimo metodo funkcinė diagrama parodyta fig. 2.9. Jis naudoja tiesioginio vertinimo matavimo prietaisą.  Matavimo technika yra tokia. Pirmiausia į matavimo prietaiso įvestį tiekiama išmatuota vertė X ir užrašomi prietaiso rodmenys (rodmenys) Y1. Po to vietoj išmatuotos vertės ta pati
Matavimo technika yra tokia. Pirmiausia į matavimo prietaiso įvestį tiekiama išmatuota vertė X ir užrašomi prietaiso rodmenys (rodmenys) Y1. Po to vietoj išmatuotos vertės ta pati 
Įrenginio įvestis (tai labai svarbu) pateikiama su X0 reikšme, kurią atkuria matas. Šiuo atveju prietaiso rodmuo tampa lygus Y2. Keičiant matu atkuriamą reikšmę, pasiekiamas rodmenų lygumas, t.y. Y1=Y2. Šiuo atveju galima teigti, kad X = X0, nepriklausomai nuo matavimo prietaiso paklaidos. Iš tiesų, pirmuoju atveju gauname Y1 = X + D1,
kur D1 – matavimo prietaiso paklaida, kai gaunamas rodmuo Y1.
Kai prietaisą veikia matas Y2= X + D2. Čia D2 yra matavimo prietaiso klaida, kai gaunamas rodmuo Y2.
Kadangi pasiekiame tuos pačius rodmenis (Y1 = Y2), o laiko intervalas tarp dviejų matavimų yra mažas, tai prie tos pačios žymos prietaiso skalėje paklaida yra ta pati, t.y. D1 = D2. Vadinasi, iš lygybės Y1 = Y2 arba X + D1 = X + D2 išplaukia, kad X = X0.
Matavimo priemonės paklaidos neįtraukimas į matavimo rezultatą yra naujas pakeitimo metodo privalumas. Taikant nulinio matavimo metodą, matavimo prietaiso paklaida pasireiškia tuo, kad nulio rodmuo gali neatitikti išmatuotos vertės ir mato lygybės, o diferencialiniu metodu reiškia paklaidą matuojant skirtumą tarp mato ir mato. išmatuota vertė. Norint gauti aukštą matavimo tikslumą naudojant nulinį ir diferencialinį metodą, būtina, kad matavimo priemonių paklaidos būtų mažos. Tačiau pakeitimo metodas nereikalauja šios sąlygos! Net jei matavimo prietaiso paklaida yra pakankamai didelė, tai neturės įtakos matavimo rezultatui. Taigi, naudojant pakeitimo metodą, galima atlikti tikslų matavimą, turint prietaisą su didele paklaida. Nesunku suprasti, kad matavimo tikslumą pakeitimo metodu lemia matavimo paklaida. Tiesa, taikant griežtesnį požiūrį į pakeitimo metodą, reikėtų atsižvelgti į dvi aplinkybes.
Pirma, čia lyginama skirtingu laiku, o per laiką tarp dviejų matavimų matavimo prietaiso paklaida gali šiek tiek pasikeisti, todėl lygybė D1 = D2 šiek tiek pažeidžiama. Dabar tampa aišku, kodėl išmatuotas kiekis ir matas turi būti tiekiami į tą patį įrenginio įvestį. Taip yra visų pirma dėl to, kad matavimo prietaiso paklaida skirtinguose įėjimuose, net ir su tais pačiais rodmenimis, gali būti skirtinga!
Antra, pakeitimo metodas yra susijęs su identiškų prietaiso rodmenų gavimu. Pačią rodmenų lygybę galima nustatyti baigtiniu tikslumu. Ir tai taip pat lemia matavimo paklaidą. Rodmenų lygybės nustatymo tikslumas bus didesnis didesnio jautrumo įrenginyje.
Todėl matuojant pakeitimo metodu reikėtų naudoti netikslų, bet jautrų ir greito veikimo prietaisą. Tada matavimo prietaiso sukelta liekamoji paklaida bus nedidelė.
Pakaitinis metodas yra tiksliausias iš visų žinomų metodų ir dažniausiai naudojamas tiksliausiems (tiksliau) matavimams atlikti. Ryškus pakeitimo metodo pavyzdys yra svėrimas su pakaitomis dedant išmatuotą masę ir svorius ant tos pačios svarstyklių padėklo (atminkite - prie tos pačios prietaiso įvesties). Yra žinoma, kad naudodami šį metodą galite teisingai išmatuoti kūno svorį, jei turite neteisingas svarstykles (instrumento klaida), bet ne svorius! (matavimo klaida).
Palyginus pakeitimo metodą ir tiesioginio vertinimo metodą, atrasime ryškų jų panašumą. Iš tikrųjų tiesioginis vertinimo metodas iš esmės yra pakeitimo metodas. Kodėl jis yra atskirtas į atskirą metodą? Reikalas tas, kad matuodami tiesioginio vertinimo metodu atliekame tik pirmąją operaciją – rodmenų nustatymą. Antroji operacija – kalibravimas (lyginimas su matu) atliekamas ne su kiekvienu matavimu, o tik prietaiso gamybos procese ir jo periodiškai tikrinant. Tarp prietaiso naudojimo ir ankstesnio patikrinimo gali praeiti didelis laiko tarpas, o matavimo priemonės paklaida per šį laiką gali labai pasikeisti. Tai lemia tai, kad tiesioginio vertinimo metodas paprastai suteikia mažesnį matavimo tikslumą nei palyginimo metodas.
Nagrinėjama matavimo metodų klasifikacija parodyta fig. 2.10. 
Ryžiai. 2.10. Matavimo metodų klasifikacija
Nagrinėjami metodai nustato matavimo priemonių konstravimo principus. Jų nereikėtų painioti su matavimo technika ir matavimo algoritmu.
Matavimo technika- detali matavimo proceso tvarka, reglamentuojantys matavimų atlikimo metodai, priemonės ir algoritmai, kurie tam tikromis (standartinėmis) sąlygomis suteikia matavimus tam tikru tikslumu.
Matavimai turi būti atliekami pagal tinkamai patvirtintus metodus. Matavimo metodų kūrimo ir sertifikavimo tvarką nustato Rusijos valstybinis standartas.
Matavimo algoritmas- tikslus nurodymas tam tikra tvarka atlikti operacijų rinkinį, užtikrinantį fizikinio dydžio vertės matavimą.
.