យន្តការសម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ។ ឧបករណ៍បំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ យន្តការបំប្លែងចលនារង្វង់ទៅជាចលនាយោល
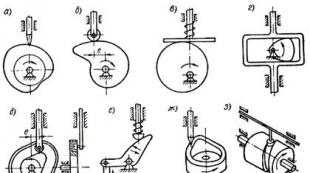
ដ្រាយសម្រាប់អនុវត្តចលនា rectilinear នៃផ្នែកធ្វើការនៃឧបករណ៍ម៉ាស៊ីនអាចត្រូវបានបែងចែកទៅជាមេកានិចបំប្លែងចលនាបង្វិលទៅជា rectilinear (រូបភាព 20, a-e), piston (រូបភាព 20, g, h), magnetostrictive និង thermodynamic ។
ដ្រាយមេកានិចត្រូវបានបែងចែកទៅជាបញ្ច្រាសនិងរង្វិល។ នៅក្នុងដ្រាយបញ្ច្រាសទិសដៅនៃចលនានៃធាតុធ្វើការផ្លាស់ប្តូរនៅពេលដែលទិសដៅនៃការបង្វិលនៃតំណភ្ជាប់ដែលបម្លែងចលនាបង្វិលទៅជាការផ្លាស់ប្តូរចលនាលីនេអ៊ែរដោយប្រើដ្រាយបញ្ច្រាសនៃចលនាបង្វិល។
ដ្រាយបញ្ច្រាសមានចលនាបង្វិល I (រូបភាពទី 20, ក) ដែលមានយន្តការបញ្ច្រាស 2 និងតំណដែលបំប្លែងចលនារង្វិលទៅជាចលនាលីនេអ៊ែរនៃរាងកាយធ្វើការ 4. ដើម្បីបំប្លែងចលនារង្វិលទៅជាចលនាលីនេអ៊ែរ អាចប្រើដូចខាងក្រោមៈ វីស 3 (រូបទី 20, ក) ដង្កូវ 2 និងដង្កូវ rack (រូបភាព 20b), spur, helical ឬ chevron rack wheel 2 ភ្ជាប់ជាមួយនឹង rack 1 (Fig ។ 20c) ដង្កូវ ឬឧបករណ៍ helical 2 ដែលមានអ័ក្សមានទីតាំងនៅ មុំទៅនឹងទិសដៅនៃចលនាដោយភ្ជាប់ជាមួយ rack 1 (រូបភាព 20 ឃ) និងការបញ្ជូនដែលអាចបត់បែនបាន 2 (រូបភាព 20 ឃ) ។
អង្ករ។ 20 យន្តការសម្រាប់ចលនាលីនេអ៊ែរ

អាស្រ័យលើលក្ខណៈនៃចលនារបស់រាងកាយការងារ ចលនាបង្វិលត្រូវតែធានាឱ្យមានការផ្លាស់ប្តូរល្បឿនស្របតាមរបៀបប្រតិបត្តិការដែលបានផ្តល់ឱ្យ ការផ្លាស់ប្តូរទិសដៅនៃចលនានៃរាងកាយធ្វើការ និងទទួលបានល្បឿនលឿនក្នុងទាំងពីរ ឬមួយ ទិសដៅ។ អាស្រ័យលើតម្រូវការដែលបានកំណត់ដោយធម្មជាតិនៃចលនារបស់រាងកាយការងារ ចលនាបង្វិលមានរចនាសម្ព័ន្ធស្មុគស្មាញតិចឬច្រើននៃយន្តការសម្រាប់ការផ្លាស់ប្តូរល្បឿននៃការដាច់សរសៃឈាមខួរក្បាលធ្វើការ យន្តការបញ្ច្រាស និងល្បឿនលឿន ព្រមទាំងប្រព័ន្ធដែលត្រូវគ្នា។ យន្តការសម្រាប់ប្តូរខ្សែសង្វាក់ kinematic និងការគ្រប់គ្រង។ ទាំងអស់នេះនាំឱ្យមានភាពស្មុគស្មាញច្រើនឬតិចនៃការរចនានៃដ្រាយចលនាលីនេអ៊ែរ។
អត្ថប្រយោជន៍សំខាន់នៃដ្រាយបញ្ច្រាសគឺសមត្ថភាពក្នុងការលៃតម្រូវប្រវែងដាច់សរសៃឈាមខួរក្បាលនិងលំដាប់នៃការរួមបញ្ចូលការដាច់សរសៃឈាមខួរក្បាលលឿននិងដំណើរការស្របតាមតម្រូវការនៃប្រតិបត្តិការបច្ចេកវិទ្យាជាក់លាក់ដែលកំណត់ការប្រើប្រាស់ដ្រាយទាំងនេះនៅលើម៉ាស៊ីនសកលនិងឯកទេស។
វាគួរតែត្រូវបានកត់សម្គាល់ថាដ្រាយបញ្ច្រាសគឺសមរម្យសម្រាប់ប្រវែងដាច់សរសៃឈាមខួរក្បាលអតិបរមានៃធាតុការងារ។
ភាពរលូន ភាពត្រឹមត្រូវនៃចលនា ភាពរឹង និងប្រសិទ្ធភាពនៃដ្រាយបញ្ច្រាសភាគច្រើនអាស្រ័យលើទម្រង់នៃការបញ្ជូនដែលប្រើដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។
ភាពរលោង និងភាពត្រឹមត្រូវត្រូវបានប៉ះពាល់ដោយភាពត្រឹមត្រូវ kinematic និងចន្លោះប្រហោងក្នុងការបញ្ជូន ដែលបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។
សូមក្រឡេកមើលឧបករណ៍ផ្សេងៗដែលប្រើដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរនៅក្នុងដ្រាយដែលអាចបញ្ច្រាសបាន។
ការបញ្ជូនវីសដាប់ខ្លួន (រូបភាពទី 20, ក) អាចត្រូវបានអនុវត្តជាមួយនឹងភាពជាក់លាក់ខ្ពស់ជាពិសេស។ យោងតាមស្តង់ដារឧស្សាហកម្មឧបករណ៍ម៉ាស៊ីនសម្រាប់វីសនៃថ្នាក់សូន្យ គម្លាតដែលអាចអនុញ្ញាតបានក្នុងទីលានមួយគឺស្មើនឹង ±2 μm ហើយកំហុសឆ្គងទីលានដែលប្រមូលផ្តុំធំបំផុតលើប្រវែង 300 មមគឺ 5 μm។ ភាពជាក់លាក់នៃការផលិតខ្ពស់ធានានូវភាពជាក់លាក់ខ្ពស់នៃចលនាជាមួយនឹងការរចនាដ្រាយសមស្រប។
ចាប់តាំងពីការបញ្ជូនវីសដាប់ខ្លួនធ្វើឱ្យវាអាចទទួលបានល្បឿនទាបនៃចលនាលីនេអ៊ែរក្នុងចំនួនដ៏ច្រើននៃបដិវត្តន៍វីស ខ្សែសង្វាក់ kinematic នៃដ្រាយចំណី និងចលនាដំឡើងនៅពេលប្រើការបញ្ជូននេះមានឧបករណ៍កាត់បន្ថយមួយចំនួនតូច ដែល នាំទៅរកភាពសាមញ្ញនៃ kinematics និងការរចនានៃដ្រាយ និងដល់ការកាត់បន្ថយនៃពេលវេលាកាត់បន្ថយនិចលភាពរបស់វាបើប្រៀបធៀបទៅនឹងដ្រាយមេកានិចផ្សេងទៀត។
ដោយសារភាពរឹងនៃការបញ្ជូនវីសត្រូវបានកំណត់ដោយការខូចទ្រង់ទ្រាយ tensile ឬ compression ក៏ដូចជា (ក្នុងកម្រិតតិចជាង) ការខូចទ្រង់ទ្រាយនៃការបង្វិល បន្ទាប់មកជាមួយនឹងប្រវែងវីសធំ និងអង្កត់ផ្ចិតតូច ភាពរឹងនៃការបញ្ជូនអាចមិនគ្រប់គ្រាន់ ដែលជះឥទ្ធិពលអវិជ្ជមានដល់ការបញ្ជូនវីស។ ភាពរលូននិងភាពត្រឹមត្រូវនៃចលនា។
គុណវិបត្តិដ៏សំខាន់មួយនៃការបញ្ជូនដែលបានពិពណ៌នាគឺប្រសិទ្ធភាពទាប។ គុណវិបត្តិនេះអាចត្រូវបានលុបចោលដោយប្រើការបញ្ជូនវីសជាមួយគ្រាប់ដែលបង្វិលនៅក្នុងគ្រាប់។ ក្នុងករណីនេះការកកិតរអិលត្រូវបានជំនួសដោយការកកិតរំកិលហើយប្រសិទ្ធភាពកើនឡើងដល់ 0.9-0.98 ។ Gears នៃប្រភេទនេះត្រូវបានគេប្រើកាន់តែខ្លាំងឡើងនៅក្នុងឧបករណ៍ម៉ាស៊ីន និងជាចម្បងនៅក្នុងប្រភេទផ្សេងៗនៃ servo drives ។
ការបញ្ជូនវីសត្រូវបានប្រើប្រាស់យ៉ាងទូលំទូលាយនៅក្នុងខ្សែសង្វាក់ទម្រង់ kinematic ដ្រាយចំណី និងចលនានៃការដំឡើង ដែលជាមួយនឹងថាមពលដ្រាយទាប ប្រសិទ្ធភាពគឺមិនសំខាន់ទេ ហើយលក្ខណៈវិជ្ជមាននៃការបញ្ជូននេះមានតួនាទីយ៉ាងសំខាន់។
ក្នុងករណីដែលការបញ្ជូនវីសមិនមានភាពរឹងគ្រប់គ្រាន់ ការបញ្ជូនដង្កូវ-rack ត្រូវបានប្រើ (រូបភាព 20b) rack ដែលមានលក្ខណៈដូចជាផ្នែកវែងនៃយចន។ ដោយសារវីសវែងនៃអង្កត់ផ្ចិតតូចត្រូវបានជំនួសដោយដង្កូវខ្លី ភាពរឹងនៃការបញ្ជូនគឺខ្ពស់ជាងច្រើន។ ទោះជាយ៉ាងណាក៏ដោយ ភាពត្រឹមត្រូវនៃការបញ្ជូន worm-rack គឺទាបជាងការបញ្ជូនវីស ដោយហេតុថា worm-rack អាចត្រូវបានធ្វើឡើងជាសមាសធាតុនៃបំណែកនីមួយៗប៉ុណ្ណោះ និងមិនអាចត្រូវបានបង្កើតឡើងដោយមានភាពត្រឹមត្រូវខ្ពស់ដូចវីសនោះទេ។ ប្រសិទ្ធភាពនៃការបញ្ជូននេះក៏ទាបជាងផងដែរ ចាប់តាំងពីអង្កត់ផ្ចិតនៃដង្កូវ ដោយសារតែលក្ខណៈពិសេសនៃការរចនានៃការដាក់របស់វា គឺធំជាងអង្កត់ផ្ចិតនៃវីស ដែលនាំឱ្យមានការថយចុះនៃមុំនៃការកើនឡើង ហើយជាលទ្ធផល ប្រសិទ្ធភាពនៃការបញ្ជូន។
ឧបករណ៍ដង្កូវ និង rack ត្រូវបានប្រើក្នុងករណីដែលទាមទារភាពរឹងនៃដ្រាយខ្ពស់ដើម្បីធានាបាននូវប្រតិបត្តិការរលូន ហើយតម្រូវការតឹងរ៉ឹងតិចត្រូវបានដាក់លើភាពត្រឹមត្រូវនៃចលនា៖ នៅក្នុងយន្តការចំណីនៃការកិនបណ្តោយ ធុញ រ៉ូតារី និងប្រភេទឧបករណ៍ម៉ាស៊ីនមួយចំនួនទៀត។
ការបញ្ជូន rack និង pinion (រូបភាព 20, គ) ដោយសារតែកំហុសធំជាងនៅក្នុងទីលាននិងចន្លោះបើប្រៀបធៀបទៅនឹងការបញ្ជូនវីស - nut ផ្តល់នូវភាពរលោងតិចនិងភាពត្រឹមត្រូវនៃចលនា។ ការបញ្ជូនមានប្រសិទ្ធភាពខ្ពស់ និងភាពរឹងខ្ពស់ដែលទាក់ទង; វាត្រូវបានប្រើនៅក្នុងដ្រាយនៃចលនាសំខាន់នៃម៉ាស៊ីនរៀបចំផែនការ និងនៅក្នុងដ្រាយចំណីនៃក្រឡឹង ទួណឺវីស ខួង ខួង និងម៉ាស៊ីនផ្សេងទៀត។
នៅក្នុងដ្រាយនៃចលនាសំខាន់នៃម៉ាស៊ីនរៀបចំផែនការឧបករណ៍ rack និង pinion មានអង្កត់ផ្ចិតធំដោយសារតែមេគុណរយៈពេលនៃការភ្ជាប់និងប្រតិបត្តិការរលូនត្រូវបានកើនឡើង។ សម្រាប់គោលបំណងដូចគ្នា ឧបករណ៍ helical និង chevron ត្រូវបានប្រើនៅក្នុងដ្រាយនៃម៉ាស៊ីនធ្វើផែនការ។ ដោយសារតែអង្កត់ផ្ចិតដ៏ធំនៃប្រអប់លេខ rack និង pinion វាចាំបាច់ត្រូវណែនាំឧបករណ៍កាត់បន្ថយមួយចំនួនធំទៅក្នុងដ្រាយដែលនាំឱ្យមានការកើនឡើងនៃការថយចុះនៃនិចលភាពនៃដ្រាយ។
នៅក្នុងដ្រាយចំណី, ឧបករណ៍ rack និង pinion ត្រូវបានធ្វើឡើងជាមួយនឹងចំនួនតូចមួយនៃធ្មេញ 12-13 ។ ការកែតម្រូវត្រូវបានប្រើដើម្បីលុបបំបាត់ការកាត់ធ្មេញ។
នៅក្នុងដ្រាយនៃម៉ាស៊ីនធ្វើប្លង់បណ្តោយ ឧបករណ៍ rack និង pinion ដែលបង្ហាញក្នុងរូបភាពទី 20 ត្រូវបានគេប្រើប្រាស់យ៉ាងទូលំទូលាយ។ ពួកវាត្រូវបានផលិតដោយប្រើដង្កូវចាប់ផ្តើមច្រើន (ឧបករណ៍ជំនួយដែលមានធ្មេញមួយចំនួនតូច និងមុំទំនោរធំ)។ ប្រអប់លេខបែបនេះមានប្រសិទ្ធភាពខ្ពស់ ធានាបាននូវដំណើរការរលូន និងកាត់បន្ថយចំនួនឧបករណ៍កាត់បន្ថយនៅក្នុងដ្រាយ។
នៅក្នុងម៉ូដែលម៉ាស៊ីនមួយចំនួន ការតភ្ជាប់ដែលអាចបត់បែនបានត្រូវបានប្រើដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ (រូបភាព 20e)។ ការតភ្ជាប់ដែលអាចបត់បែនបាន 2 ត្រូវបានភ្ជាប់ទៅថាស 1. កាសែតដែក ខ្សែ ឬខ្សែអាចប្រើជាការតភ្ជាប់ដែលអាចបត់បែនបាន។ ម៉្យាងទៀតការតភ្ជាប់ត្រូវបានភ្ជាប់ទៅនឹងខ្សែ 3 នៃតួធ្វើការ 4. នៅពេលដែលឌីស 1 ត្រូវបានបត់ តួធ្វើការផ្លាស់ទីក្នុងបន្ទាត់ត្រង់មួយ។ ការតភ្ជាប់ដែលអាចបត់បែនបានក្នុងទម្រង់ជាបន្ទះដែក និងខ្សែផ្តល់នូវភាពជាក់លាក់ខ្ពស់នៃចលនានៅក្រោមបន្ទុកស្រាល និងត្រូវបានប្រើប្រាស់នៅក្នុងយន្តការដែលកំពុងដំណើរការនៃម៉ាស៊ីនកែច្នៃប្រអប់លេខផ្សេងៗ៖ ការកិនប្រអប់លេខ សម្រាប់ការគាស់ប្រអប់លេខ។ល។
នៅក្នុងដ្រាយវដ្តមិនដូចដ្រាយបញ្ច្រាសទិសនៃចលនានៃធាតុការងារត្រូវបានផ្លាស់ប្តូរដោយមានជំនួយពីតំណភ្ជាប់ខ្លួនវាដែលបម្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរខណៈពេលដែលទិសដៅនៃការបង្វិលនៃតំណភ្ជាប់ចុងក្រោយនៅតែមិនផ្លាស់ប្តូរ។
ដ្រាយស៊ីក្លូរួមមាន crank, crank-rotary និងយន្តការ cam ។
ដ្រាយ crank និង crank អាចអនុវត្តបានតែមុខងារមួយចំនួនដែលត្រូវបានផ្តល់ទៅឱ្យដ្រាយចលនាលីនេអ៊ែរ។
ដូច្នេះ crank drive ដំណើរការតែមុខងារនៃយន្តការបញ្ច្រាសនៅពេលផ្លាស់ប្តូរទិសដៅនៃចលនា។ ល្បឿនទៅមុខ និងបញ្ច្រាសគឺដូចគ្នា និងប្រែប្រួលតាមប្រវែងដាច់សរសៃឈាមខួរក្បាល។ ប្រវែងដាច់សរសៃឈាមខួរក្បាលត្រូវបានផ្លាស់ប្តូរដោយការផ្លាស់ប្តូរកាំ crank ។ ជាមួយនឹងប្រវែងដាច់សរសៃឈាមខួរក្បាលធំ យន្តការកាន់តែពិបាក។ យន្តការនេះរកឃើញការប្រើប្រាស់មានកំណត់ជាមួយនឹងប្រវែងដាច់សរសៃឈាមខួរក្បាលខ្លីពី 100-300 មីលីម៉ែត្រនៅក្នុងដ្រាយនៃចលនាសំខាន់នៃរាងប្រអប់លេខ និងម៉ាស៊ីនរៀបចំប្រអប់លេខ ដែលការបង្កើនល្បឿនបញ្ច្រាសមិនផ្តល់នូវការកើនឡើងគួរឱ្យកត់សម្គាល់នៃផលិតភាពនៅក្នុងដ្រាយចំណីនៃរន្ធដោត។ និងម៉ាស៊ីនកិនគ្រាប់ចុច។ យន្តការ crank-yoke ធ្វើឱ្យវាអាចទទួលបានការកើនឡើងនៃល្បឿនត្រឡប់មកវិញ ដែលជាមុខងារនៃការដាច់សរសៃឈាមខួរក្បាលធ្វើការ ហើយលើសពីវាបន្តិច។ ល្បឿនតាមបណ្តោយប្រវែងដាច់សរសៃឈាមខួរក្បាលគឺប្រែប្រួល។ យន្តការនៃប្រភេទនេះជាមួយនឹងស្លាយវិល និងបង្វិលត្រូវបានប្រើនៅក្នុងម៉ាស៊ីនកាត់ និងរន្ធដោតដែលមានប្រវែងដាច់សរសៃឈាមខួរក្បាលរហូតដល់ 900-1000 មីលីម៉ែត្រ។
យន្តការរបស់ Cam (រូបភាព 20, ង) អនុវត្តមុខងារទាំងអស់នៃចលនាលីនេអ៊ែរ ដោយផ្តល់ទម្រង់ដែលត្រូវគ្នាទៅនឹង cam ។ កាំរាងស៊ីឡាំង 1 ដែលមានចង្អូរកោង ដែលក្នុងនោះ roller ភ្ជាប់ទៅនឹងតួធ្វើការដែលអាចផ្លាស់ទីបាន 2 សមនឹងនៅក្នុងផ្នែក a មានការកើនឡើងខ្ពស់ដែលត្រូវគ្នាទៅនឹងចលនាទៅមុខយ៉ាងលឿន នៅក្នុងផ្នែក b មានការកើនឡើងយ៉ាងទន់ភ្លន់ដែលត្រូវគ្នាទៅនឹងការដាច់សរសៃឈាមខួរក្បាលធ្វើការ ហើយ នៅក្នុងផ្នែក c មានផ្លូវចោតដែលត្រូវដើរថយក្រោយយ៉ាងលឿន។ ដូច្នេះ ដោយមានជំនួយពីយន្តការ cam លំដាប់នៃចលនាដែលត្រូវការនៃតួធ្វើការជាមួយនឹងល្បឿនដែលបានផ្តល់ឱ្យ និងប្រវែងដាច់សរសៃឈាមខួរក្បាលអាចសម្រេចបានយ៉ាងងាយស្រួល ដោយសារតែយន្តការ cam ត្រូវបានគេប្រើយ៉ាងទូលំទូលាយនៅក្នុងម៉ាស៊ីនស្វ័យប្រវត្តិ។ គុណវិបត្តិនៃយន្តការ cam គឺតម្រូវការក្នុងការផលិត cams ពិសេសទាក់ទងនឹងប្រតិបត្តិការបច្ចេកវិជ្ជាជាក់លាក់មួយ។
Piston ជំរុញចលនា rectilinear ។ ជាមួយនឹង piston drives (Fig ។ 20g) តួធ្វើការ 2 ក្នុងករណីភាគច្រើនត្រូវបានភ្ជាប់ដោយផ្ទាល់ទៅនឹង piston 1 ឬ piston drive cylinder ដែលធ្វើឱ្យវាអាចធ្វើទៅបានយ៉ាងសំខាន់ក្នុងការសម្រួលដល់ kinematics ទាំងមូល និងការរចនានៃអង្គភាពម៉ាស៊ីនដែលត្រូវគ្នា។ មានតែនៅក្នុងករណីខ្លះ នៅពេលដែលចលនាជាក់លាក់ជាក់លាក់ត្រូវបានអនុវត្ត ហើយតួធ្វើការមានប្រវែងខ្លី ប្រដាប់កាត់បន្ថយកម្រិតមធ្យមត្រូវបានណែនាំពីដ្រាយពីស្តុងទៅតួធ្វើការ (រូបភាព 20 ម៉ោង)។
ដោយសារតែភាពសាមញ្ញនៃការរចនារបស់ពួកគេ piston drives នៃប្រភេទផ្សេងៗត្រូវបានប្រើប្រាស់យ៉ាងទូលំទូលាយនៅក្នុងឧបករណ៍ម៉ាស៊ីន។
ការបង្កើតនេះទាក់ទងនឹងយន្តការសម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ។ យន្ដការនេះមានអ័ក្សរាងជារង្វង់ អ័ក្សព្រះអាទិត្យដែលមានទីតាំងនៅខាងក្នុងអ័ក្សរាងជារង្វង់ និងពហុកោណនៃអ័ក្សភព។ សង្វៀនមានផ្នែកខ្សែស្រឡាយខាងក្នុង និងឧបករណ៍ក្រវ៉ាត់ទីមួយ និងទីពីរ ដែលជាឧបករណ៍ខាងក្នុង។ អ័ក្សព្រះអាទិត្យរួមបញ្ចូលផ្នែកខាងក្រៅ និងឧបករណ៍ព្រះអាទិត្យទីមួយ និងទីពីរ ដែលឧបករណ៍ព្រះអាទិត្យគឺជាឧបករណ៍ខាងក្រៅ។ អ័ក្សរបស់ភពត្រូវបានរៀបចំជុំវិញអ័ក្សព្រះអាទិត្យ ដែលអ័ក្សនីមួយៗរួមមានផ្នែកខាងក្រៅ និងឧបករណ៍ភពទីមួយ និងទីពីរ ដែលជាឧបករណ៍ខាងក្រៅ។ ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សភពនីមួយៗ ភ្ជាប់ផ្នែកខាងក្នុងនៃអ័ក្សរាងជារង្វង់ និងផ្នែកខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ។ ភពទី 1 និងទី 2 ភ្ជាប់សំណាញ់នីមួយៗដោយឧបករណ៍រោទិ៍ទីមួយ និងទីពីរ និងឧបករណ៍ព្រះអាទិត្យរៀងគ្នា។ ក្នុងករណីនេះ អ័ក្សភពត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីផ្តល់ការបង្វិលទាក់ទងគ្នារវាងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរ។ ដំណោះស្រាយគឺសំដៅកាត់បន្ថយការពាក់លើយន្តការ និងបង្កើនប្រសិទ្ធភាពនៃការបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ។ 14 ប្រាក់ខែ f-ly, 9 ឈឺ។
គំនូរសម្រាប់ប៉ាតង់ RF 2386067







វិស័យបច្ចេកវិទ្យា
ការច្នៃប្រឌិតបច្ចុប្បន្នទាក់ទងនឹងយន្តការបំប្លែងចលនាបង្វិល/បកប្រែសម្រាប់បំប្លែងចលនារង្វិលទៅជាចលនាបកប្រែ។
ស្ថានភាពសិល្បៈ
ជាយន្តការសម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ ជាឧទាហរណ៍ យន្តការបំប្លែងដែលបានបង្ហាញនៅក្នុង WO 2004/094870 (តទៅនេះហៅថាឯកសារ 1) ត្រូវបានស្នើឡើង។ យន្តការបំប្លែងរួមមាន អ័ក្សអញ្ចាញ ដែលមានចន្លោះលាតសន្ធឹងក្នុងទិសអ័ក្ស អ័ក្សព្រះអាទិត្យដែលមានទីតាំងនៅខាងក្នុងអ័ក្សអនាធិបតេយ្យ និងអ័ក្សភពដែលមានទីតាំងនៅជុំវិញអ័ក្សព្រះអាទិត្យ។ លើសពីនេះ ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅដែលបង្កើតឡើងនៅលើបរិមាត្រខាងក្រៅនៃអ័ក្សភព ភ្ជាប់ជាមួយនឹងផ្នែកខាងក្នុងនៃអ័ក្សដែលបង្កើតឡើងនៅលើរង្វង់ខាងក្នុងនៃអ័ក្សអ័រគីដេ និងផ្នែកខ្សែស្រឡាយខាងក្រៅដែលបង្កើតឡើងនៅលើរង្វង់ខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ។ ដូច្នេះកម្លាំងត្រូវបានផ្ទេររវាងសមាសធាតុទាំងនេះ។ ចលនាភពនៃអ័ក្សរបស់ភពដែលត្រូវបានទទួលនៅពេលដែលអ័ក្សអ័រមូនវិល បណ្តាលឱ្យអ័ក្សព្រះអាទិត្យផ្លាស់ទីទៅមុខតាមទិសអ័ក្សនៃអ័ក្សអ័រគីដេ។ នោះគឺយន្តការបំប្លែងបំប្លែងចលនាបង្វិលដែលផ្គត់ផ្គង់ទៅអ័ក្សអនាធិបតេយ្យទៅជាចលនាលីនេអ៊ែរនៃអ័ក្សព្រះអាទិត្យ។
នៅក្នុងយន្តការបំប្លែងដែលបានរៀបរាប់ខាងលើ ប្រអប់លេខពីរត្រូវបានផ្តល់ដើម្បីឱ្យកម្លាំងត្រូវបានបញ្ជូនដោយការស្រោបនៃប្រអប់លេខ បន្ថែមពីលើការស្រោបនៃផ្នែកដែលមានខ្សែស្រឡាយរវាងអ័ក្សចិញ្ចៀន និងអ័ក្សភព។ នោះមានន័យថា យន្តការបំប្លែង រួមមានរថភ្លើងប្រអប់លេខដែលត្រូវបានបង្កើតឡើងដោយឧបករណ៍រោទិ៍ទីមួយដែលផ្តល់នៅចុងម្ខាងនៃអ័ក្សសង្វៀន និងឧបករណ៍ភពទីមួយដែលផ្តល់នៅចុងម្ខាងនៃអ័ក្សភព ដើម្បីភ្ជាប់ជាមួយឧបករណ៍រង្វង់ទីមួយ និង រថភ្លើងប្រអប់លេខដែលបង្កើតឡើងដោយឧបករណ៍រង្វង់ទីពីរដែលផ្តល់នៅចុងម្ខាងទៀតនៃអ័ក្សសង្វៀន និងឧបករណ៍ភពទីពីរដែលផ្តល់នៅចុងម្ខាងទៀតនៃអ័ក្សរបស់ភព ដើម្បីភ្ជាប់ជាមួយឧបករណ៍រង្វង់ទីពីរ។
នៅក្នុងយន្តការបំប្លែងយោងទៅតាមឯកសារទី 1 នៅពេលដែលដំណាក់កាលបង្វិលនៃឧបករណ៍រោទិ៍ទីមួយខុសពីដំណាក់កាលបង្វិលនៃអ័ក្សក្រវ៉ាត់ទីពីរ អ័ក្សរបស់ភពត្រូវបានរៀបចំរវាងអ័ក្សចិញ្ចៀន និងអ័ក្សព្រះអាទិត្យក្នុងស្ថានភាពទំនោរទាក់ទងទៅនឹង ទីតាំងដើម (ទីតាំងដែលបន្ទាត់កណ្តាលនៃអ័ក្សភពគឺស្របទៅនឹងខ្សែកណ្តាលនៃអ័ក្សព្រះអាទិត្យ) ។ ដូច្នេះការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយរវាង ring shafts, planetary shafts និង sun shaft ក្លាយទៅជាមិនស្មើគ្នា។ នេះបង្កើនការពាក់ក្នុងតំបន់ កាត់បន្ថយប្រសិទ្ធភាពនៃការបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។ បញ្ហាបែបនេះកើតឡើងមិនត្រឹមតែនៅក្នុងយន្តការបំប្លែងខាងលើប៉ុណ្ណោះទេ ប៉ុន្តែនៅក្នុងយន្តការបំប្លែងណាមួយ រួមទាំងប្រអប់លេខដែលបង្កើតឡើងដោយប្រអប់ហ្គែររបស់ភពផែនដី និងប្រអប់ហ្គែរយ៉ាងហោចណាស់មួយនៃអ័ក្សរង្វង់ និងអ័ក្សព្រះអាទិត្យ។
ការពិពណ៌នាសង្ខេបនៃការបង្កើត
ដូច្នោះហើយ វត្ថុមួយនៃការច្នៃប្រឌិតបច្ចុប្បន្នគឺដើម្បីផ្តល់នូវយន្តការបំប្លែងចលនាបង្វិល/បកប្រែ ដែលរារាំងការលំអៀងនៃអ័ក្សភពដែលបណ្តាលមកពីការភ្ជាប់នៃអ័ក្សភព និងឧបករណ៍យ៉ាងហោចណាស់មួយនៃអ័ក្សរង្វង់ និងអ័ក្សព្រះអាទិត្យ។
ដើម្បីសម្រេចបាននូវវត្ថុនេះ ទិដ្ឋភាពដំបូងនៃការបង្កើតបច្ចុប្បន្នផ្តល់នូវយន្តការបំប្លែងចលនារង្វិល/បកប្រែ ដែលរួមមានអ័ក្សអ័ក្ស អ័ក្សព្រះអាទិត្យ អ័ក្សភព ក៏ដូចជាឧបករណ៍ទីមួយ និងឧបករណ៍ទីពីរ។ អ័ក្ស annular ត្រូវបានផ្តល់ឱ្យនូវចន្លោះដែលលាតសន្ធឹងក្នុងទិសដៅអ័ក្ស។ បន្ទះស្រូបពន្លឺព្រះអាទិត្យមានទីតាំងនៅខាងក្នុងអ័ក្សអ័រគីដេ។ អ័ក្សភពផែនដីមានទីតាំងនៅជុំវិញអ័ក្សព្រះអាទិត្យ។ ឧបករណ៍ទីមួយនិងឧបករណ៍ទីពីរបញ្ជូនកម្លាំងរវាងអ័ក្សអ័រគីដេនិងអ័ក្សភព។ យន្តការបំប្លែង ចលនារង្វិលនៃអ័ក្សអនាធិបតេយ្យមួយ និងអ័ក្សព្រះអាទិត្យ ទៅជាចលនាបកប្រែ និងតាមទិសអ័ក្សនៃអ័ក្សអញ្ចាញមួយទៀត និងអ័ក្សព្រះអាទិត្យ ដោយសារចលនារបស់ភពផែនដី។ អ័ក្សរបស់ភពរួមមានឧបករណ៍ភពទីមួយដែលកំណត់រចនាសម្ព័ន្ធផ្នែករថភ្លើងប្រអប់លេខទីមួយ និងឧបករណ៍ទីពីរដែលកំណត់រចនាសម្ព័ន្ធផ្នែករថភ្លើងប្រអប់លេខទីពីរ។ អ័ក្សភពត្រូវបានបង្កើតឡើងដើម្បីអនុញ្ញាតឱ្យបង្វិលទាក់ទងគ្នារវាងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរ។
ទិដ្ឋភាពទីពីរនៃការប្រឌិតបច្ចុប្បន្នផ្តល់នូវយន្តការបំប្លែងចលនាបង្វិល/បកប្រែ ដែលរួមមាន អ័ក្សអញ្ចាញ អ័ក្សព្រះអាទិត្យ អ័ក្សភព ក៏ដូចជាឧបករណ៍ទីមួយ និងឧបករណ៍ទីពីរ។ អ័ក្ស annular ត្រូវបានផ្តល់ឱ្យនូវចន្លោះដែលលាតសន្ធឹងក្នុងទិសដៅអ័ក្ស។ បន្ទះស្រូបពន្លឺព្រះអាទិត្យមានទីតាំងនៅខាងក្នុងអ័ក្សអ័រគីដេ។ អ័ក្សភពផែនដីមានទីតាំងនៅជុំវិញអ័ក្សព្រះអាទិត្យ។ ឧបករណ៍ទីមួយនិងឧបករណ៍ទីពីរបញ្ជូនកម្លាំងរវាងអ័ក្សភពនិងអ័ក្សព្រះអាទិត្យ។ យន្តការបំប្លែងបំប្លែងចលនារង្វិលនៃអ័ក្សភពមួយ និងអ័ក្សព្រះអាទិត្យទៅជាចលនាបកប្រែ និងតាមអ័ក្សអ័ក្ស មួយទៀតនៃអ័ក្សភព និងអ័ក្សព្រះអាទិត្យ ដោយសារចលនារបស់ភពផែនដី។ អ័ក្សរបស់ភពរួមមានឧបករណ៍ភពទីមួយដែលបង្កើតជាផ្នែកនៃរថភ្លើងប្រអប់លេខទីមួយ និងឧបករណ៍ទីពីរដែលបង្កើតជាផ្នែកនៃរថភ្លើងប្រអប់លេខទីពីរ។ អ័ក្សភពត្រូវបានបង្កើតឡើងដើម្បីអនុញ្ញាតឱ្យបង្វិលទាក់ទងគ្នារវាងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរ។
ការពិពណ៌នាសង្ខេបនៃគំនូរ
រូបភាពទី 1 គឺជាទិដ្ឋភាពដែលបង្ហាញពីយន្តការបំប្លែងនៅក្នុងយន្តការសម្រាប់បំប្លែងចលនារង្វិលទៅជាចលនាលីនេអ៊ែរ យោងទៅតាមតំណាងដំបូងនៃការបង្កើតបច្ចុប្បន្ន។
រូបភាពទី 2 គឺជាទិដ្ឋភាពដែលបង្ហាញពីរចនាសម្ព័ន្ធផ្ទៃក្នុងនៃយន្តការបំប្លែងរូបភព 1;
រូបភាពទី 3(A) គឺជាទិដ្ឋភាពផ្នែកដែលបង្ហាញពីរាងមូលនៃយន្តការបំប្លែងរូបភាព 1;
រូបភាពទី 3(B) គឺជាទិដ្ឋភាពផ្នែកដែលបង្ហាញពីស្ថានភាពដែលផ្នែកនៃមកុដនៃរូបភព 1 ត្រូវបានផ្តាច់ចេញ។
រូបភាពទី 4(A) គឺជាទិដ្ឋភាពខាងមុខដែលបង្ហាញពីអ័ក្សព្រះអាទិត្យនៃយន្តការបំប្លែងរូបភាព 1;
រូបភព 4(B) គឺជាទិដ្ឋភាពខាងមុខដែលបង្ហាញពីស្ថានភាពដែលផ្នែកនៃបន្ទះសូឡានៃរូបភព 4(A) ត្រូវបានផ្តាច់ចេញ។
រូបភព 5(A) គឺជាទិដ្ឋភាពខាងមុខដែលបង្ហាញពីអ័ក្សភពនៃយន្តការបំប្លែងនៃរូបភព។ 1;
រូបភាព 5(B) គឺជាទិដ្ឋភាពខាងមុខដែលបង្ហាញពីស្ថានភាពដែលផ្នែកនៃរូបភព 5(A) ត្រូវបានរុះរើចេញ។
រូបភាពទី 5(C) គឺជាទិដ្ឋភាពផ្នែកដែលថតនៅតាមបណ្តោយបន្ទាត់កណ្តាលនៃប្រអប់លេខភពខាងក្រោយនៃរូបភាព 5(A);
រូបភាពទី 6 គឺជាទិដ្ឋភាពផ្នែកដែលយកតាមបន្ទាត់កណ្តាលនៃយន្តការបំប្លែងនៃរូបទី 1;
រូបភាពទី 7 គឺជាទិដ្ឋភាពតាមផ្នែកតាមបន្ទាត់ទី 7-7 នៃរូបភាពទី 6 ដែលបង្ហាញពីយន្តការបំប្លែងនៃរូបភព 1;
រូបភាពទី 8 គឺជាទិដ្ឋភាពផ្នែកដែលថតនៅតាមបណ្តោយបន្ទាត់ទី 8-8 នៃរូបភាពទី 6 ដែលបង្ហាញពីយន្តការបំប្លែងរូបភាពទី 1 ។ និង
រូបភាពទី 9 គឺជាទិដ្ឋភាពផ្នែកដែលថតនៅខ្សែទី 9-9 នៃរូបភាពទី 6 ដែលបង្ហាញពីយន្តការបំប្លែងនៃរូបភព។ 1 ។
របៀបល្អបំផុតសម្រាប់អនុវត្តការច្នៃប្រឌិត
បន្ទាប់មក តំណាងដំបូងនៃការបង្កើតថ្មីនេះនឹងត្រូវបានពិពណ៌នាដោយយោងទៅរូបភាពទី 1 ដល់ 9 ។ តទៅនេះ ការកំណត់រចនាសម្ព័ន្ធនៃយន្តការបំប្លែងចលនារង្វិល/បកប្រែ 1 យោងទៅតាមតំណាងទីមួយ វិធីសាស្ត្រប្រតិបត្តិការនៃយន្តការបំប្លែង 1 និងគោលការណ៍ប្រតិបត្តិការនៃយន្តការបំប្លែង 1 នឹងត្រូវបានពិពណ៌នានៅក្នុងលំដាប់នេះ។
យន្តការបំប្លែង 1 ត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃរាងមកុដ 2 ដែលមានចន្លោះលាតសន្ធឹងក្នុងទិសអ័ក្ស អ័ក្សព្រះអាទិត្យដែលមានទីតាំងនៅខាងក្នុងនៃម្កុដ 2 និងអ័ក្សភព 4 ដែលមានទីតាំងនៅជុំវិញ។ អ័ក្សព្រះអាទិត្យ 3. មកុដ 2 និង shaft ព្រះអាទិត្យ 3 មានទីតាំងស្ថិតនៅក្នុងស្ថានភាពមួយដែលបន្ទាត់កណ្តាលត្រូវបានតម្រឹមឬតម្រឹមយ៉ាងសំខាន់ជាមួយគ្នាទៅវិញទៅមក។ អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ត្រូវបានរៀបចំក្នុងស្ថានភាពមួយដែលបន្ទាត់កណ្តាលស្របគ្នាឬស្របគ្នាយ៉ាងសំខាន់ទៅគ្នាទៅវិញទៅមក។ លើសពីនេះ អ័ក្សភព 4 មានទីតាំងនៅជុំវិញអ័ក្សព្រះអាទិត្យ 3 នៅចន្លោះពេលស្មើគ្នា។
នៅក្នុងតំណាងទីមួយ ទីតាំងដែលបន្ទាត់កណ្តាលនៃធាតុផ្សំនៃយន្តការបំប្លែង 1 ត្រូវបានតម្រឹម ឬតម្រឹមយ៉ាងសំខាន់ជាមួយនឹងបន្ទាត់កណ្តាលនៃអ័ក្សព្រះអាទិត្យ 2 នឹងត្រូវបានចង្អុលបង្ហាញថាជាទីតាំងកណ្តាល។ លើសពីនេះទៀត ទីតាំងដែលបន្ទាត់កណ្តាលនៃសមាសធាតុស្របគ្នា ឬស្របគ្នាយ៉ាងសំខាន់ទៅនឹងបន្ទាត់កណ្តាលនៃអ័ក្សព្រះអាទិត្យ 3 នឹងត្រូវបានចង្អុលបង្ហាញថាជាទីតាំងប៉ារ៉ាឡែល។ នោះគឺមកុដ 2 ត្រូវបានដាក់នៅទីតាំងកណ្តាល។ លើសពីនេះទៀតអ័ក្សរបស់ភព 4 ត្រូវបានរក្សានៅក្នុងទីតាំងស្របគ្នា។
នៅក្នុងយន្តការបំប្លែង 1 ផ្នែកដែលមានខ្សែស្រឡាយ និងឧបករណ៍ដែលផ្តល់នៅលើកំណាត់មកុដ 2 សំណាញ់ជាមួយនឹងផ្នែកខ្សែស្រឡាយ និងឧបករណ៍ដែលផ្តល់នៅលើអ័ក្សភពនីមួយៗ 4 ដូច្នេះកម្លាំងត្រូវបានបញ្ជូនពីផ្នែកមួយទៅផ្នែកមួយទៀតរវាងអ័ក្សមកុដ 2 និង អ័ក្សភព 4. លើសពីនេះ ផ្នែកដែលមានខ្សែស្រឡាយ និងឧបករណ៍ដែលផ្តល់នៅលើ shaft ព្រះអាទិត្យ 3 ភ្ជាប់ជាមួយផ្នែកខ្សែស្រឡាយ និងឧបករណ៍ដែលបានផ្តល់នៅលើ shafts ភពនីមួយៗ 4 ដូច្នេះកម្លាំងត្រូវបានបញ្ជូនពីសមាសធាតុមួយទៅផ្នែកមួយទៀតរវាង អ័ក្សព្រះអាទិត្យ ៣ និងអ័ក្សភព ៤.
យន្តការបំប្លែង 1 ដំណើរការដូចបានរៀបរាប់ខាងក្រោម ដោយផ្អែកលើការរួមបញ្ចូលគ្នានៃសមាសធាតុបែបនេះ។ នៅពេលដែលធាតុផ្សំមួយ រួមទាំង ក្បូនមកុដ 2 និង អ័ក្សព្រះអាទិត្យ 3 ត្រូវបានបង្វិល ដោយប្រើ បន្ទាត់កណ្តាលនៃ អ័ក្ស 2 (អ័ក្សព្រះអាទិត្យ 3) ជាអ័ក្សនៃការបង្វិល អ័ក្សភព 4 ធ្វើចលនាភពជុំវិញ អ័ក្សព្រះអាទិត្យ 3 ដោយសារ ទៅកម្លាំងដែលបញ្ជូនពីមួយពីសមាសធាតុ។ ដូច្នោះហើយ ដោយសារកម្លាំងបញ្ជូនពីអ័ក្សភពទៅក្បូន 2 និងអ័ក្សព្រះអាទិត្យ 3 មកុដ 2 និងអ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទាក់ទងទៅនឹងអ័ក្សភព 4 ស្របទៅនឹងខ្សែកណ្តាលនៃរាងមកុដ 2 (ព្រះអាទិត្យ អ័ក្ស 3) ។
ដូច្នេះ យន្តការបំប្លែង ១ បំប្លែងចលនារង្វិលនៃរាងមកុដមួយ និងអ័ក្សព្រះអាទិត្យ ៣ ទៅជាចលនាបកប្រែនៃក្រោនមួយទៀត ២ និងអ័ក្សព្រះអាទិត្យ ៣. នៅក្នុងធាតុទីមួយ ទិសដែល អ័ក្សព្រះអាទិត្យ 3 ត្រូវបានរុញចេញពីអ័ក្សមកុដ 2 តាមបណ្តោយអ័ក្សព្រះអាទិត្យ អ័ក្ស 3 ត្រូវបានចង្អុលបង្ហាញថាជាទិសដៅខាងមុខ FR ហើយទិសដៅដែលអ័ក្សព្រះអាទិត្យ 3 លាតសន្ធឹងចូលទៅក្នុងច្រាំងមកុដ 2 ត្រូវបានចង្អុលបង្ហាញថាជាទិសដៅខាងក្រោយ RR ។ លើសពីនេះទៅទៀត នៅពេលដែលទីតាំងកំណត់នៃយន្តការបំប្លែង 1 ត្រូវបានគេយកជាចំណុចយោង តំបន់ក្នុងទិសដៅទៅមុខ FR ពីទីតាំងយោងត្រូវបានបញ្ជាក់ជាផ្នែកខាងមុខ ហើយតំបន់ក្នុងទិសដៅខាងក្រោយ RR ពីទីតាំងយោងត្រូវបានបញ្ជាក់។ ដូចជាផ្នែកខាងក្រោយ។
ការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ដែលគាំទ្រអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានភ្ជាប់ជាមួយនឹងរាងមកុដ 2. ការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ផ្លាស់ទីជាដុំតែមួយ។ នៅម្កុដ 2 ផ្នែកបើកចំហនៃផ្នែកខាងមុខត្រូវបានបិទដោយការប្រណាំងខាងមុខ 51. លើសពីនេះទៀតផ្នែកបើកចំហនៃផ្នែកខាងក្រោយត្រូវបានបិទដោយការប្រណាំងខាងក្រោយ 52 ។
អ័ក្សព្រះអាទិត្យ 3 ត្រូវបានគាំទ្រដោយទ្រនាប់ 51A នៃការប្រណាំងខាងមុខ 51 និងទ្រនាប់ 52A នៃការប្រណាំងខាងក្រោយ 52។ អ័ក្សភព 4 មិនត្រូវបានគាំទ្រដោយការប្រណាំងខាងមុខ 51 ឬដោយការប្រណាំងខាងក្រោយ 52។ ពោលគឺនៅក្នុងការបំប្លែង យន្តការទី 1 ខណៈពេលដែលទីតាំងរ៉ាឌីកាល់នៃអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានកំណត់ដោយការចូលរួមនៃផ្នែកនិងឧបករណ៍ដែលមានខ្សែស្រឡាយការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ទីតាំងរ៉ាឌីកាល់នៃអ័ក្សភព 4 ត្រូវបានកំណត់តែដោយការភ្ជាប់គ្នា។ ផ្នែកខ្សែស្រឡាយនិងឧបករណ៍។
យន្តការបំប្លែង 1 ទទួលយកការកំណត់ដូចខាងក្រោមដើម្បីរំអិលផ្នែកខាងក្នុងនៃម្កុដ 2 (ទីតាំងដែលផ្នែកដែលមានខ្សែស្រឡាយ និងឧបករណ៍នៃមកុដ 2 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ភ្ជាប់គ្នាទៅវិញទៅមក) ឱ្យបានត្រឹមត្រូវ។ រន្ធទឹករំអិល 51H សម្រាប់ផ្គត់ផ្គង់ប្រេងរំអិលដល់ក្រោន 2 ត្រូវបានបង្កើតឡើងនៅក្នុងការប្រណាំងខាងមុខ 51។ លើសពីនេះ រន្ធ O-ring 53 សម្រាប់បិទភ្ជាប់ផ្នែកខាងក្នុងនៃម្កុដ 2 ត្រូវបានតំឡើងនៅលើការប្រណាំងខាងមុខនីមួយៗ 51 និងការប្រណាំងខាងក្រោយ 52 ការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ត្រូវគ្នាទៅនឹងសមាជិកដែលមានសមាជិក។
ការកំណត់រចនាសម្ព័ន្ធនៃម្កុដ 2 នឹងត្រូវបានពិពណ៌នាដោយយោងទៅរូបភព 3 ។ ចិញ្ចៀនសង្វៀន 2 ត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួមេនៃ ring shaft 21 (ring shaft main body) , ring ring gear 22 ( the first ring gear ) and the rear ring gear 23 ( the second ring gear ) ។ នៅក្នុងផ្នែកខាងមកុដ 2 បន្ទាត់កណ្តាល (អ័ក្ស) នៃតួមេរបស់ម្កុដ 21 ត្រូវគ្នាទៅនឹងបន្ទាត់កណ្តាល (អ័ក្ស) នៃរាងមកុដ 2. ដូច្នេះនៅពេលដែលខ្សែកណ្តាលនៃរាងមកុដតួមេ 21 ត្រូវបានតម្រឹម ឬយ៉ាងសំខាន់។ តម្រឹមជាមួយបន្ទាត់កណ្តាលនៃអ័ក្សព្រះអាទិត្យ 3, មកុដ shaft 2 គឺស្ថិតនៅក្នុងទីតាំងកណ្តាលមួយ។ ឧបករណ៍រង្វង់ខាងមុខ 22 និងឧបករណ៍ក្រវ៉ាត់ខាងក្រោយនីមួយៗត្រូវគ្នាទៅនឹងឧបករណ៍ចិញ្ចៀនដែលមានធ្មេញខាងក្នុង។
តួមេរបស់ ring shaft 21 រួមមានផ្នែកសំខាន់នៃខ្សែ 21A ដែលត្រូវបានផ្តល់ជាមួយនឹងផ្នែកខាងក្នុងនៃខ្សែស្រឡាយ 24 ដែលបង្កើតឡើងនៅលើផ្ទៃរង្វង់ខាងក្នុង ផ្នែកសំខាន់នៃតួ 21B ដែលប្រដាប់ពាក់ចិញ្ចៀនខាងមុខត្រូវបានម៉ោន និងផ្នែកសំខាន់នៃតួ។ 21C ដែលឧបករណ៍រង្វង់ខាងមុខត្រូវបានម៉ោន។
ឧបករណ៍ក្រវ៉ាត់ខាងមុខ 22 ត្រូវបានបង្កើតឡើងជាឧបករណ៍ helical ខាងក្នុងដាច់ដោយឡែកពីតួសំខាន់ 21 នៃ ring shaft ។ លើសពីនេះ ប្រដាប់ពាក់ចិញ្ចៀនខាងមុខ 22 ត្រូវបានកំណត់រចនាសម្ព័ន្ធ ដូច្នេះខ្សែកណ្តាលរបស់វាត្រូវបានតម្រឹមជាមួយនឹងខ្សែកណ្តាលនៃតួមេ 21 នៅពេលដំឡើងនៅលើតួមេ 21 ។ ចំពោះវិធីសាស្រ្តនៃការដំឡើងឧបករណ៍ក្រវ៉ាត់ខាងមុខ 22 ចូលទៅក្នុងតួមេរបស់ ring shaft 21 នោះ ring ring gear ខាងមុខ 22 ត្រូវបានចុច-បំពាក់ទៅនឹង ring shaft main body 21 នៅក្នុង embodiment ដំបូង។ ប្រដាប់ពាក់ចិញ្ចៀនខាងមុខ 22 អាចត្រូវបានភ្ជាប់ទៅតួមេរបស់ ring shaft 21 ក្នុងលក្ខណៈផ្សេងក្រៅពីការចុចសម។
ឧបករណ៍រោទិ៍ខាងក្រោយ 23 ត្រូវបានបង្កើតឡើងជាឧបករណ៍ helical ខាងក្នុងដាច់ដោយឡែកពីតួសំខាន់ 21 នៃអ័ក្សសង្វៀន។ បន្ថែមពីលើនេះ ប្រដាប់ពាក់ចិញ្ចៀនខាងក្រោយ 23 ត្រូវបានបង្កើតឡើងដូចដែលខ្សែកណ្តាលរបស់វាត្រូវបានតម្រឹមជាមួយនឹងខ្សែកណ្តាលនៃតួមេនៃសង្វៀន 21 នៅពេលដែលបានម៉ោននៅលើតួមេ 21 ។ ចំពោះវិធីសាស្រ្តនៃការដំឡើងឧបករណ៍រោទ៍ខាងក្រោយ 23 ចូលទៅក្នុងតួមេរបស់ ring shaft 21 នោះ ring ring gear gear 23 ខាងក្រោយគឺត្រូវបាន press-fitted to the ring shaft main body 21 in the first embodiment. ឧបករណ៍រោទិ៍ខាងក្រោយ 23 អាចត្រូវបានភ្ជាប់ទៅនឹងតួមេ 21 តាមរបៀបផ្សេងក្រៅពីការចុចសម។
នៅក្នុង ring shaft 2, gear ring front 22 និង rear ring gear 23 ត្រូវបានបង្កើតឡើងជា gears ដែលមានរាងដូចគ្នា។ នោះគឺការកំណត់លក្ខណៈពិសេស (ដូចជាអង្កត់ផ្ចិតទីលានយោង និងចំនួនធ្មេញ) នៃឧបករណ៍ក្រវ៉ាត់មុខ 22 និងឧបករណ៍ក្រវ៉ាត់ក្រោយ 23 ត្រូវបានកំណត់ទៅតម្លៃដូចគ្នា។
អ័ក្សព្រះអាទិត្យ 3 ត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 (តួសំខាន់នៃអ័ក្សព្រះអាទិត្យ) និងឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 ។ សម្រាប់អ័ក្សព្រះអាទិត្យ 3 ខ្សែកណ្តាល (អ័ក្ស) នៃតួមេនៃអ័ក្សព្រះអាទិត្យ 31 ត្រូវគ្នាទៅនឹង បន្ទាត់កណ្តាល (អ័ក្ស) នៃអ័ក្សព្រះអាទិត្យ 3.
តួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 ត្រូវបានបង្កើតឡើងដោយផ្នែកខ្សែស្រឡាយតួ 31A ដែលមានផ្នែកខាងក្រៅនៃខ្សែ 34 ដែលបង្កើតឡើងនៅលើផ្ទៃរង្វង់ខាងក្រៅរបស់វា ដោយផ្នែកឧបករណ៍តួសំខាន់ 31B ដែលឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 (ឧបករណ៍ព្រះអាទិត្យទីមួយ) បម្រើ។ ដូចជាឧបករណ៍មួយត្រូវបានបង្កើតឡើង។ ឧបករណ៍ខាងក្រៅជាមួយនឹងធ្មេញ helical និងផ្នែកសំខាន់នៃតួ 31C ដែលឧបករណ៍ព្រះអាទិត្យខាងក្រោយ (ឧបករណ៍ព្រះអាទិត្យទីពីរ) ត្រូវបានម៉ោន។ ឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងឧបករណ៍ព្រះអាទិត្យខាងក្រោយនីមួយៗត្រូវគ្នាទៅនឹងឧបករណ៍ព្រះអាទិត្យដែលមានធ្មេញឧបករណ៍ខាងក្រៅ។
ឧបករណ៍ការពារព្រះអាទិត្យខាងក្រោយ 33 ត្រូវបានបង្កើតឡើងជាឧបករណ៍ចង្កឹះខាងក្រៅដោយឡែកពីតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 ។ លើសពីនេះទៀតឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 ត្រូវបានបង្កើតឡើងដូចដែលខ្សែកណ្តាលរបស់វាត្រូវបានតម្រឹមជាមួយនឹងបន្ទាត់កណ្តាលនៃអ័ក្សព្រះអាទិត្យតួសំខាន់ 31 នៅពេលដែលបានម៉ោននៅលើតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 ។ ចំពោះវិធីសាស្រ្តនៃការដំឡើងឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 នៅលើតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31, ឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 ត្រូវបានភ្ជាប់ទៅនឹងតួនៃអ័ក្សព្រះអាទិត្យ 31 ដោយចុចសមនៅក្នុងរូបទីមួយ។ ឧបករណ៍ការពារព្រះអាទិត្យខាងក្រោយ 33 អាចត្រូវបានភ្ជាប់ជាមួយនឹងតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 តាមរបៀបផ្សេងក្រៅពីការចុចសម។
នៅលើអ័ក្សព្រះអាទិត្យ 3 ឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 ត្រូវបានបង្កើតឡើងជាប្រអប់លេខដែលមានរាងដូចគ្នា។ នោះគឺការកំណត់ជាក់លាក់ (ដូចជាអង្កត់ផ្ចិតទីលានយោង និងចំនួនធ្មេញ) នៃឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងឧបករណ៍ព្រះអាទិត្យក្រោយ 33 ត្រូវបានកំណត់តម្លៃដូចគ្នា។
ការកំណត់រចនាសម្ព័ន្ធនៃភព 4 នឹងត្រូវបានពិពណ៌នាដោយយោងទៅរូបភព 5 ។ អ័ក្សភពនីមួយៗ 4 ត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួសំខាន់នៃអ័ក្សភព 41 (តួសំខាន់នៃអ័ក្សភព) និងឧបករណ៍ភពខាងក្រោយ 43 ។ សម្រាប់អ័ក្សភពទី 4 ខ្សែកណ្តាល (អ័ក្ស) នៃតួសំខាន់នៃអ័ក្សភព 41 ត្រូវគ្នាទៅនឹង បន្ទាត់កណ្តាល (អ័ក្ស) នៃអ័ក្សភព 4. ដូច្នេះនៅពេលដែលខ្សែកណ្តាលនៃអ័ក្សភព 41 ស្របគ្នា ឬស្របគ្នាយ៉ាងសំខាន់ទៅនឹងបន្ទាត់កណ្តាលនៃអ័ក្សព្រះអាទិត្យ 3 អ័ក្សភព 4 ស្ថិតនៅក្នុងទីតាំងស្របគ្នា។
តួសំខាន់នៃអ័ក្សភព 41 ត្រូវបានបង្កើតឡើងដោយផ្នែកស្នូលនៃតួ 41A ដែលត្រូវបានផ្តល់ជាមួយនឹងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 ដែលបង្កើតឡើងនៅលើផ្ទៃរង្វង់ខាងក្រៅរបស់វា ដែលជាផ្នែកសំខាន់នៃតួ 41B ដែលឧបករណ៍ភពខាងមុខ 42 (ឧបករណ៍ភពទីមួយ។ ) ការបម្រើជាឧបករណ៍ត្រូវបានបង្កើតឡើង ប្រដាប់ខាងក្រៅជាមួយនឹងធ្មេញ oblique, អ័ក្សខាងក្រោយ 41R ដែលប្រអប់លេខភពខាងក្រោយ 43 (ឧបករណ៍ភពទីពីរ) ត្រូវបានម៉ោន និងអ័ក្សខាងមុខ 41F ដែលត្រូវបានបញ្ចូលទៅក្នុង mandrel ក្នុងអំឡុងពេលនៃការជួបប្រជុំគ្នា។ យន្តការបំប្លែង ១. លើសពីនេះ ប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពខាងក្រោយ 43 នីមួយៗត្រូវគ្នាទៅនឹងឧបករណ៍ភពខាងក្រៅ។
ឧបករណ៍ភពខាងក្រោយ 43 ត្រូវបានបង្កើតឡើងជាឧបករណ៍ helical ខាងក្រៅដាច់ដោយឡែកពីតួសំខាន់នៃអ័ក្សភព 41 ។ លើសពីនេះទៀតដោយការបញ្ចូលអ័ក្សខាងក្រោយ 41R នៃតួសំខាន់នៃអ័ក្សភព 41 ទៅក្នុងរន្ធទ្រនាប់ 43H ឧបករណ៍ភពខាងក្រោយ 43 ត្រូវបានម៉ោននៅលើតួសំខាន់នៃអ័ក្សភព 41 ។ លើសពីនេះ ប្រអប់លេខភពខាងក្រោយ 43 ត្រូវបានបង្កើតឡើងដែលខ្សែកណ្តាលរបស់វាត្រូវបានតម្រឹមជាមួយនឹងខ្សែកណ្តាលនៃតួសំខាន់នៃអ័ក្សភព 41 នៅពេលដែលបានម៉ោននៅលើតួសំខាន់នៃអ័ក្សភព 41 ។
ចំពោះវិធីសាស្រ្តនៃការដំឡើងឧបករណ៍ភពខាងក្រោយ 43 នៅលើតួសំខាន់នៃអ័ក្សភព 41 ការសមរលុងត្រូវបានអនុម័តនៅក្នុងធាតុទីមួយ ដូច្នេះឧបករណ៍ភពខាងក្រោយអាចបង្វិលបានទាក់ទងទៅនឹងតួសំខាន់នៃអ័ក្សភព 41 ។ ចំពោះវិធីសាស្រ្តនៃការដំឡើងសម្រាប់ការអនុញ្ញាតឱ្យតួសំខាន់នៃអ័ក្ស 41 និងប្រអប់លេខភពខាងក្រោយ 43 បង្វិលទាក់ទងគ្នាទៅវិញទៅមក វិធីសាស្ត្រដំឡើងក្រៅពីការបំពាក់ដោយសេរីអាចត្រូវបានប្រើ។
នៅលើអ័ក្សភព 4 ប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពក្រោយ 43 ត្រូវបានបង្កើតឡើងជាប្រអប់លេខដែលមានរាងដូចគ្នា។ នោះគឺការកំណត់ជាក់លាក់ (ដូចជាអង្កត់ផ្ចិតទីលានយោង និងចំនួនធ្មេញ) នៃប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពក្រោយ 43 ត្រូវបានកំណត់ជាតម្លៃដូចគ្នា។
ដោយយោងទៅលើរូបភាពទី 6 ដល់លេខ 9 ទំនាក់ទំនងរវាងធាតុផ្សំនៃយន្តការបំប្លែង 1 នឹងត្រូវបានពិពណ៌នា។ នៅក្នុងការបញ្ជាក់នេះ យន្តការបំប្លែង 1 បំពាក់ដោយអ័ក្សភព 9 4 ត្រូវបានផ្តល់ជាឧទាហរណ៍មួយ ទោះបីជាចំនួននៃអ័ក្សភព 4 អាចត្រូវបានផ្លាស់ប្តូរតាមតម្រូវការក៏ដោយ។
នៅក្នុងយន្តការបំប្លែង 1 ប្រតិបត្តិការនៃសមាសធាតុត្រូវបានបើក ឬកំណត់ដូចដែលបានរៀបរាប់ខាងក្រោមក្នុង (a)-(c)។
(ក) ចំពោះអ័ក្សសង្វៀន 2, តួមេរបស់ ring shaft 21, ring ring gear ខាងមុខ 22 និង rear ring gear 23 ត្រូវបានរារាំងពីការបង្វិលដែលទាក់ទងគ្នាទៅវិញទៅមក។ លើសពីនេះ តួមេរបស់ម្កុដ 21 ការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ត្រូវបានរារាំងពីការបង្វិលដែលទាក់ទងគ្នាទៅវិញទៅមក។
(ខ) សម្រាប់អ័ក្សព្រះអាទិត្យ 3 តួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 និងឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 ត្រូវបានរារាំងមិនឱ្យបង្វិលទាក់ទងគ្នាទៅវិញទៅមក។
(គ) ទាក់ទងនឹងអ័ក្សភព 4 តួសំខាន់នៃអ័ក្សភព 41 និងឧបករណ៍ភពខាងក្រោយ 43 ត្រូវបានអនុញ្ញាតឱ្យបង្វិលទាក់ទងគ្នាទៅវិញទៅមក។
នៅក្នុងយន្តការបំប្លែង 1 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 កម្លាំងត្រូវបានបញ្ជូនរវាងសមាសធាតុដូចដែលបានពិពណ៌នាខាងក្រោមដោយសារតែការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយនិងឧបករណ៍នៃអ័ក្សចិញ្ចៀន 2 ។
ទាក់ទងនឹងអ័ក្សមកុដ 2 និងអ័ក្សភព 4 ផ្នែកដែលមានខ្សែស្រឡាយខាងក្នុង 24 នៃផ្នែកសំខាន់នៃម្កុដ 21 និងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃផ្នែកសំខាន់នៃអ័ក្សរបស់ភពនីមួយៗ 41 ត្រូវបានភ្ជាប់ជាមួយគ្នាទៅវិញទៅមក។ បន្ថែមពីលើនេះ ប្រដាប់ពាក់ចិញ្ចៀនខាងមុខ 22 នៃតួមេ 21 និងឧបករណ៍រណបខាងមុខ 42 នៃតួមេនៃអ័ក្ស 41 នីមួយៗត្រូវបានភ្ជាប់គ្នាទៅវិញទៅមក។ លើសពីនេះ ប្រដាប់ពាក់ចិញ្ចៀនខាងក្រោយ 23 នៃតួមេរបស់ ring shaft 21 និង gear planetary gear ខាងក្រោយ 43 នៃ planetary shaft main body 41 ត្រូវបានភ្ជាប់គ្នាទៅវិញទៅមក។
ដូច្នេះនៅពេលដែលចលនាបង្វិលត្រូវបានអនុវត្តទៅអ័ក្សចិញ្ចៀន 2 ឬអ័ក្សភព 4 កម្លាំងមួយត្រូវបានបញ្ជូនទៅមួយទៀតនៃអ័ក្សរង្វង់ 2 និងអ័ក្សភព 4 តាមរយៈការភ្ជាប់នៃផ្នែកខ្សែស្រឡាយខាងក្នុង 24 និងផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ។ 44 ការភ្ជាប់ឧបករណ៍រង្វង់ខាងមុខ 22 និងប្រអប់លេខភពខាងមុខ 42 ការភ្ជាប់ឧបករណ៍រង្វង់ខាងក្រោយ 23 និងប្រអប់លេខភពខាងក្រោយ 43 ។
នៅអ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភពទី 4 ផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 និងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃផ្នែកសំខាន់នៃអ័ក្សភពនីមួយៗ 41 ភ្ជាប់គ្នាទៅវិញទៅមក។ លើសពីនេះទៀតឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 នៃតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 និងឧបករណ៍ភពខាងមុខ 42 នៃតួរបស់អ័ក្សភពនីមួយៗ 41 ត្រូវបានភ្ជាប់គ្នាទៅវិញទៅមក។ លើសពីនេះទៀតឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 នៃតួសំខាន់នៃអ័ក្សព្រះអាទិត្យ 31 និងឧបករណ៍ភពខាងក្រោយ 43 នៃតួរបស់អ័ក្សភពនីមួយៗគឺ 41 ត្រូវបានភ្ជាប់គ្នាទៅវិញទៅមក។
ដូច្នេះនៅពេលដែលចលនាបង្វិលត្រូវបានអនុវត្តទៅអ័ក្សព្រះអាទិត្យ 3 ឬអ័ក្សភព 4 កម្លាំងមួយត្រូវបានបញ្ជូនទៅមួយទៀតនៃអ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 តាមរយៈការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ 34 និងផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ។ 44 ការភ្ជាប់ឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងឧបករណ៍ភពខាងមុខ 42 ការភ្ជាប់ឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 និងឧបករណ៍ភពខាងក្រោយ 43 ។
ដូចដែលបានរៀបរាប់ខាងលើ យន្តការបំប្លែង 1 រួមមានយន្តការពន្យារដែលបង្កើតឡើងដោយផ្នែកខាងក្នុងនៃខ្សែស្រឡាយ 24 នៃម្កុដ 2 ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ 24 នៃម្កុដ 2 ផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងផ្នែកខាងក្រៅ។ ផ្នែកដែលមានខ្សែស្រឡាយ 44 នៃអ័ក្សភព 4 យន្តការយឺតយ៉ាវ (រថភ្លើងប្រអប់លេខដំបូង) បង្កើតឡើងដោយឧបករណ៍រង្វង់ខាងមុខ 22 ឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងប្រអប់លេខភពខាងមុខ 42 និងយន្តការបន្ថយល្បឿន (ឧបករណ៍ទីពីរ) ដែលបង្កើតឡើងដោយ ប្រអប់លេខខាងក្រោយ ២៣ ប្រអប់លេខព្រះអាទិត្យក្រោយ ៣៣ និងប្រអប់លេខភពខាងក្រោយ ៤៣។
នៅក្នុងយន្តការបំប្លែង 1 យោងទៅតាមខ្សែនៃផ្នែកនីមួយៗនៃខ្សែស្រឡាយ របៀបប្រតិបត្តិការ (របៀបបំប្លែងចលនា) សម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ ត្រូវបានកំណត់ដោយផ្អែកលើចំនួន និងវិធីកំណត់ចំនួនធ្មេញរបស់ឧបករណ៍នីមួយៗ។ នោះគឺជារបៀបបំប្លែងចលនា ទាំងរបៀបចលនាអ័ក្សព្រះអាទិត្យត្រូវបានជ្រើសរើស ដែលក្នុងនោះអ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីបកប្រែដោយសារចលនាបង្វិលនៃអ័ក្សមកុដ ឬរបៀបចលនារាងស្រោបរាងជារង្វង់ ដែលអ័ក្សមកុដ 2 ផ្លាស់ទី។ translationally ដោយសារតែចលនាបង្វិលនៃ shaft ព្រះអាទិត្យ 3. នៅពេលអនាគតវានឹងជាវិធីសាស្រ្តនៃប្រតិបត្តិការនៃយន្តការបម្លែង 1 នៅក្នុងរបៀបបំប្លែងចលនានីមួយៗត្រូវបានពិពណ៌នា។
(ក) នៅពេលដែលរបៀបរំកិលអ័ក្សព្រះអាទិត្យត្រូវបានអនុវត្តជារបៀបបំប្លែងចលនា ចលនាបង្វិលត្រូវបានបំប្លែងទៅជាចលនាលីនេអ៊ែរដូចបានរៀបរាប់ខាងក្រោម។ នៅពេលដែលចលនារង្វិលត្រូវបានអនុវត្តទៅអ័ក្សរង្វង់ 2 កម្លាំងត្រូវបានបញ្ជូនពីអ័ក្សមកុដ 2 ទៅអ័ក្សភព 4 តាមរយៈការភ្ជាប់របស់ឧបករណ៍រង្វង់ខាងមុខ 22 និងឧបករណ៍រណបខាងមុខ 42 ការភ្ជាប់ឧបករណ៍រង្វង់ខាងក្រោយ 23 និង ប្រអប់លេខភពខាងក្រោយ 43 ការភ្ជាប់នៃផ្នែកខាងក្នុងនៃខ្សែ 24 និងខ្សែស្រឡាយខាងក្រៅ ផ្នែកទី 44 ។ ដូច្នេះ អ័ក្សភព 4 បង្វិលដោយអ័ក្សកណ្តាលរបស់ពួកគេបម្រើជាមជ្ឈមណ្ឌលនៃការបង្វិល អំពីអ័ក្សព្រះអាទិត្យ 3 និងបង្វិលជុំវិញអ័ក្សព្រះអាទិត្យ។ 3, ជាមួយនឹងអ័ក្សកណ្តាលនៃអ័ក្សព្រះអាទិត្យ 3 បម្រើជាកណ្តាលនៃការបង្វិល។ អមដោយចលនារបស់ភពផែនដី 4 កម្លាំងត្រូវបានបញ្ជូនពីអ័ក្សភព 4 ទៅកាន់អ័ក្សព្រះអាទិត្យ 3 តាមរយៈការភ្ជាប់នៃប្រអប់លេខរបស់ភពខាងមុខ 42 និងឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 ការចូលរួមនៃប្រអប់លេខរបស់ភពក្រោយ 43 និង ឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33, ការភ្ជាប់នៃផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ 44 និងផ្នែកខាងក្រៅដែលមានខ្សែស្រឡាយ 34 ដូច្នោះហើយអ័ក្សពន្លឺព្រះអាទិត្យ 3 ត្រូវបានផ្លាស់ទីលំនៅក្នុងទិសអ័ក្ស។
(ខ) នៅពេលដែលរបៀបរំកិលអ័ក្សចិញ្ចៀនត្រូវបានអនុវត្តជារបៀបបំប្លែងចលនា ចលនាបង្វិលត្រូវបានបំប្លែងទៅជាចលនាលីនេអ៊ែរដូចបានរៀបរាប់ខាងក្រោម។ នៅពេលដែលចលនាបង្វិលត្រូវបានអនុវត្តទៅអ័ក្សព្រះអាទិត្យ 3 កម្លាំងមួយត្រូវបានបញ្ជូនពីអ័ក្សព្រះអាទិត្យ 3 ទៅអ័ក្សភព 4 តាមរយៈការចូលរួមរបស់ឧបករណ៍ព្រះអាទិត្យខាងមុខ 32 និងឧបករណ៍ភពខាងមុខ 42 ការចូលរួមរបស់ឧបករណ៍ព្រះអាទិត្យខាងក្រោយ 33 និង ផ្នែកខាងក្រោយរបស់ភពទី 43 ការភ្ជាប់នៃផ្នែកខ្សែស្រឡាយបុរស 34 និងខ្សែស្រឡាយបុរស ផ្នែកទី 44 ។ ដូច្នេះ អ័ក្សភព 4 បង្វិលដោយអ័ក្សកណ្តាលរបស់ពួកគេបម្រើជាមជ្ឈមណ្ឌលនៃការបង្វិល អំពីអ័ក្សព្រះអាទិត្យ 3 និងបង្វិលជុំវិញព្រះអាទិត្យ។ shaft 3 ដែលមានអ័ក្សកណ្តាលនៃ shaft ពន្លឺព្រះអាទិត្យ 3 បម្រើជាកណ្តាលនៃការបង្វិល។ អមជាមួយចលនារបស់ភពផែនដី 4 កម្លាំងត្រូវបានបញ្ជូនពីអ័ក្សភព 4 ទៅកាន់អ័ក្សមកុដ 2 តាមរយៈការភ្ជាប់នៃប្រអប់លេខភពខាងមុខ 42 និងឧបករណ៍រង្វង់ខាងមុខ 22 ការចូលរួមរបស់ឧបករណ៍ភពខាងក្រោយ 43 និង ឧបករណ៍មកុដខាងក្រោយ 23, ការភ្ជាប់នៃផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ 44 និងផ្នែកខាងក្នុងដែលមានខ្សែស្រឡាយ 24 ដូច្នោះហើយមកុដ 2 ត្រូវបានផ្លាស់ទីលំនៅក្នុងទិសអ័ក្ស។
គោលការណ៍ប្រតិបត្តិការនៃយន្តការបំប្លែង 1 ឥឡូវនេះនឹងត្រូវបានពិពណ៌នា។ បនា្ទាប់មក អង្កត់ផ្ចិតជម្រេយោង និងចំនួនធ្មេញរបស់ប្រអប់លេខ 2 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ត្រូវបានបង្ហាញដូចបង្ហាញក្នុង (A) ដល់ (F) ខាងក្រោម។ លើសពីនេះ អង្កត់ផ្ចិតទីលានយោង និងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយនៃម្កុដ 2 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ត្រូវបានបង្ហាញដូចបង្ហាញក្នុងរូបភាពខាងក្រោម (a) ដល់ (f) ។
"អង្កត់ផ្ចិតនៃទីលានយោង និងចំនួនធ្មេញប្រអប់លេខ"
(ក) អង្កត់ផ្ចិតឧបករណ៍រោទិ៍ដែលមានប្រសិទ្ធភាព DGr៖ អង្កត់ផ្ចិតនៃប្រអប់លេខយោង ២២, ២៣។
(ខ) អង្កត់ផ្ចិតឧបករណ៍ព្រះអាទិត្យដែលមានប្រសិទ្ធភាព DGs៖ អង្កត់ផ្ចិតនៃប្រអប់លេខព្រះអាទិត្យ ៣២, ៣៣។
(គ) អង្កត់ផ្ចិតប្រកបដោយប្រសិទ្ធភាពនៃឧបករណ៍ភព, DGp៖ អង្កត់ផ្ចិតនៃប្រអប់លេខភព ៤២, ៤៣។
(ឃ) ចំនួនធ្មេញប្រអប់លេខ ZGr៖ ចំនួនធ្មេញឧបករណ៍រោទិ៍ ២២, ២៣។
(ង) ចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs៖ ចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ៣២, ៣៣។
(F) ចំនួនធ្មេញរបស់ឧបករណ៍ភព, ZGp: ចំនួនធ្មេញរបស់ឧបករណ៍ភព 42, 43 ។
"អង្កត់ផ្ចិតនៃខ្សែយោង និងចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ"
(a) អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ annular, DSr: អង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយខាងក្នុង 24 នៃកំណាត់មកុដ 2 ។
(ខ) អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រូបពន្លឺព្រះអាទិត្យ DSs៖ អង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3.
(គ) អង្កត់ផ្ចិតដែលមានប្រសិទ្ធិភាពនៃផ្នែកខ្សែស្រឡាយភព DSp: អង្កត់ផ្ចិតនៃខ្សែយោងនៃផ្នែកខាងក្រៅ 44 នៃអ័ក្សភព 4 ។
(d) ចំនួននៃខ្សែស្រឡាយនៃផ្នែក annular threaded, ZSr: ចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្នុងនៃខ្សែស្រឡាយ 24 នៃមកុដ shaft 2 ។
(e) ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រូបពន្លឺព្រះអាទិត្យ ZSs: ចំនួនខ្សែស្រឡាយនៃផ្នែកខាងក្រៅ 34 នៃកំណាត់ព្រះអាទិត្យ 3 ។
(f) ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព, ZSp: ចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្រៅនៃ 44 អ័ក្សភព 4 ។
នៅក្នុងយន្តការបំប្លែង 1 នៅពេលដែលអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សរបស់ភព 4 ក្នុងទិសអ័ក្ស សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp (the សមាមាត្រ ZSA នៃចំនួនខ្សែស្រឡាយនៃព្រះអាទិត្យទៅខ្សែស្រឡាយភព) ខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញព្រះអាទិត្យ ZGs ទៅចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp (សមាមាត្រ ZGA នៃចំនួនធ្មេញរបស់ព្រះអាទិត្យទៅនឹងភព។ ) សមាមាត្រនៃចំនួនវេននៃខ្សែស្រឡាយ annular ZSr ទៅនឹងចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp (សមាមាត្រ ZSB នៃចំនួននៃការបង្វិលខ្សែស្រឡាយនៃ annular ទៅខ្សែស្រឡាយភព) គឺស្មើនឹងសមាមាត្រនៃចំនួន ធ្មេញរបស់ឧបករណ៍សង្វៀន ZGr ទៅនឹងចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp (សមាមាត្រ ZGB នៃចំនួនធ្មេញរបស់សង្វៀនទៅភព) ។ នោះគឺ [កន្សោម 11] និង [កន្សោម 12] ខាងក្រោមគឺពេញចិត្ត។
នៅក្នុងយន្តការបំប្លែង 1 នៅពេលដែលអ័ក្សមកុដ 2 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សរបស់ភព 4 ក្នុងទិសអ័ក្ស សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular ZSr ទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp (the សមាមាត្រ ZSB នៃចំនួនខ្សែស្រឡាយនៃព្រះអាទិត្យទៅខ្សែស្រឡាយភព) ខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ annular ZGr ទៅនឹងចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp (សមាមាត្រ ZGB នៃចំនួនធ្មេញនៃរង្វង់ទៅភព។ ) សមាមាត្រនៃចំនួនវេននៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ទៅនឹងចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp (សមាមាត្រ ZSA នៃចំនួននៃការបង្វិលខ្សែស្រឡាយនៃព្រះអាទិត្យទៅភព) គឺស្មើនឹងសមាមាត្រនៃចំនួនធ្មេញ។ នៃឧបករណ៍ព្រះអាទិត្យ ZGs ទៅនឹងចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp (សមាមាត្រ ZGA នៃចំនួនធ្មេញរបស់ព្រះអាទិត្យទៅភព) ។ នោះគឺ [កន្សោម 21] និង [កន្សោម 22] ខាងក្រោមគឺពេញចិត្ត។
នៅទីនេះ យន្តការពន្យារដែលបង្កើតឡើងដោយផ្នែកខាងក្នុងនៃខ្សែ 24 ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ 34 និងផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ 44 នឹងត្រូវបានសំដៅថាជាយន្តការពន្យារភពដំបូង ហើយយន្តការពន្យារដែលបង្កើតឡើងដោយឧបករណ៍រោទិ៍ 22, 23, ព្រះអាទិត្យ។ gears 32, 33, និង planetary gears 42 43 នឹងត្រូវបានចង្អុលបង្ហាញថាជាយន្តការបន្ថយល្បឿននៃភពទីពីរ។
នៅពេលដែលអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សរបស់ភព 4 ក្នុងទិសអ័ក្ស សមាមាត្រចំនួនខ្សែស្រឡាយព្រះអាទិត្យទៅភពផ្កាយ ZSA នៃយន្តការពន្យារភពទីមួយគឺខុសពីសមាមាត្រចំនួនធ្មេញរបស់ព្រះអាទិត្យទៅភពផែនដី ZGA នៃយន្តការបន្ថយល្បឿនរបស់ភពទីពីរ។ ដូចដែលបានបង្ហាញដោយ [កន្សោម 11] និង [កន្សោម 12] ។ នៅពេលដែលអ័ក្សមកុដ 2 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សរបស់ភព 4 ក្នុងទិសដៅមួយតាមបណ្តោយទិសអ័ក្សនៃមកុដ 2 សមាមាត្រ ZSB នៃចំនួននៃរង្វង់ទៅខ្សែស្រឡាយភពនៃយន្តការបន្ថយល្បឿននៃភពទីមួយគឺខុសគ្នាពីសមាមាត្រ ZGB នៃ ចំនួននៃរង្វង់ទៅធ្មេញភពនៃយន្តការបន្ថយល្បឿននៃភពទីពីរ ដូចដែលបានបង្ហាញដោយ [សមីការ 21] និង [កន្សោម 22] ។
ជាលទ្ធផល ក្នុងករណីណាមួយខាងលើ កម្លាំងមួយធ្វើសកម្មភាពរវាងយន្តការបន្ថយល្បឿនរបស់ភពទីមួយ និងយន្តការបន្ថយល្បឿននៃភពទីពីរ ដើម្បីបង្កើតភាពខុសគ្នានៃមុំបង្វិលដោយបរិមាណដែលត្រូវគ្នាទៅនឹងភាពខុសគ្នារវាងសមាមាត្រចំនួនខ្សែស្រឡាយ និងចំនួនធ្មេញ។ សមាមាត្រ។ ទោះជាយ៉ាងណាក៏ដោយ ដោយសារផ្នែកដែលមានខ្សែរនៃអ្នកពន្យាភពទី 1 និងប្រអប់ហ្គែររបស់ឧបករណ៍ចាប់សញ្ញាភពទីពីរត្រូវបានបង្កើតឡើងជាផ្នែកសំខាន់មួយ ភាពខុសគ្នានៃមុំបង្វិលមិនអាចបង្កើតបានរវាងអ្នកពន្យាភពទី 1 និងឧបករណ៍ពន្យាភពទីពីរបានទេ។ ដូច្នេះ អ័ក្សព្រះអាទិត្យ 3 ឬមកុដ 2 ផ្លាស់ទីទាក់ទងទៅនឹងអ័ក្សភព 4 ក្នុងទិសអ័ក្សដើម្បីស្រូបយកភាពខុសគ្នានៃមុំបង្វិល។ នៅពេលនេះសមាសធាតុដែលត្រូវបានផ្លាស់ទីលំនៅក្នុងទិសអ័ក្ស (អ័ក្សព្រះអាទិត្យ 3 ឬមកុដ 2) ត្រូវបានកំណត់ដូចដែលបានពិពណ៌នាខាងក្រោម។
(ក) នៅពេលដែលសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយភព ZSp គឺខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញរបស់ព្រះអាទិត្យ ZGs ទៅចំនួនធ្មេញរបស់ឧបករណ៍ភព។ ZGp, អ័ក្សព្រះអាទិត្យ 3 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សភព 4 ក្នុងទិសដៅអ័ក្ស។
(b) នៅពេលដែលសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular ZSr ទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp គឺខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ចិញ្ចៀន ZGr ទៅនឹងចំនួនធ្មេញរបស់ ឧបករណ៍ភព ZGp, អ័ក្សចិញ្ចៀន 2 ត្រូវបានផ្លាស់ទីលំនៅទាក់ទងទៅនឹងអ័ក្សភព 4 ក្នុងទិសដៅអ័ក្ស។
ដូច្នេះយន្តការបំប្លែង 1 ប្រើភាពខុសគ្នានៃមុំបង្វិលដែលបង្កើតដោយភាពខុសគ្នានៃសមាមាត្រនៃចំនួនខ្សែស្រឡាយនិងសមាមាត្រនៃចំនួនធ្មេញរបស់អ័ក្សព្រះអាទិត្យឬរាងមកុដដោយគោរពទៅនឹងអ័ក្សភព 4 រវាងពីរ។ ប្រភេទនៃយន្តការពន្យារភព និងទទួលបានការផ្លាស់ប្តូរអ័ក្សដែលត្រូវគ្នាទៅនឹងភាពខុសគ្នានៃមុំបង្វិល តាមបណ្តោយផ្នែកដែលមានខ្សែស្រឡាយ ដោយហេតុនេះការបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ។
នៅក្នុងយន្តការបំប្លែង 1 ដោយកំណត់យ៉ាងហោចណាស់មួយក្នុងចំនោម "ចំនួននៃធ្មេញដែលមានប្រសិទ្ធភាព" និង "ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព" ដែលបានពិពណ៌នាខាងក្រោមទៅជាតម្លៃផ្សេងពី "0" សម្រាប់ម្កុដ 2 ឬអ័ក្សព្រះអាទិត្យ 3 ដែលជាការបកប្រែ។ ចលនានៃអ័ក្សព្រះអាទិត្យ 3 ដោយផ្អែកលើទំនាក់ទំនងរវាងសមាមាត្រ ZSA នៃចំនួននៃខ្សែស្រឡាយព្រះអាទិត្យទៅភពនិងសមាមាត្រ ZGA នៃចំនួននៃព្រះអាទិត្យទៅភពផែនដីឬចលនាបកប្រែនៃរាងមកុដ 2 ដោយផ្អែកលើ ទំនាក់ទំនងរវាងសមាមាត្រ ZSB នៃចំនួននៃរង្វង់ទៅខ្សែស្រឡាយភព និងសមាមាត្រ ZGB នៃចំនួនធ្មេញ annular ទៅភព។
"កំណត់ចំនួនធ្មេញសកម្ម"
នៅក្នុងយន្តការពន្យាពេលភពធម្មតា (យន្តការពន្យារប្រភេទឧបករណ៍ភព) ដែលបង្កើតឡើងដោយឧបករណ៍រោទិ៍ ឧបករណ៍ព្រះអាទិត្យ និងឧបករណ៍ភព ពោលគឺនៅក្នុងយន្តការពន្យារប្រភេទភពដែលបន្ថយល្បឿននៃការបង្វិលដោយសារតែការភ្ជាប់នៃប្រអប់លេខ ទំនាក់ទំនងតំណាងឱ្យ ដូចខាងក្រោមជាមួយ [កន្សោម 31] ទៅ [កន្សោម 33] ។ [កន្សោម 31] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតនៃទីលានយោងនៃឧបករណ៍ចិញ្ចៀន ឧបករណ៍ព្រះអាទិត្យ និងឧបករណ៍ភព។ [កន្សោម 32] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍ ឧបករណ៍ព្រះអាទិត្យ និងឧបករណ៍ភព។ [កន្សោម 33] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតទីលានយោង និងចំនួនធ្មេញរបស់ឧបករណ៍ចិញ្ចៀន ឧបករណ៍ព្រះអាទិត្យ និងឧបករណ៍ភព។
| ដារ=DAs+2×DAp | [កន្សោម ៣១] |
| ZAr=ZAs+2×ZAp | [កន្សោម ៣២] |
| DAR/ZAr=DAs/ZAs=DAp/ZAp | [កន្សោម ៣៣] |
DAR: ring gear reference pitch អង្កត់ផ្ចិត
DAs: អង្កត់ផ្ចិតទីលានយោងឧបករណ៍ព្រះអាទិត្យ
DAp: អង្កត់ផ្ចិតទីលានយោងឧបករណ៍ភព
ZAr: ចំនួននៃធ្មេញប្រអប់លេខ
ZAs: ចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ
ZAp: ចំនួនធ្មេញឧបករណ៍ភព
នៅក្នុងយន្តការបំប្លែង 1 នៃធាតុទីមួយ បានផ្តល់ថាយន្តការបន្ថយល្បឿនរបស់ភពទីពីរ ពោលគឺយន្តការនៃការបន្ថយល្បឿនដែលបង្កើតឡើងដោយឧបករណ៍រោទិ៍ 22, 23, ប្រអប់លេខព្រះអាទិត្យ 32, 33 និងប្រអប់លេខរបស់ភព 42, 43 មានការកំណត់រចនាសម្ព័ន្ធដូចគ្នានឹង យន្តការដែលបានរៀបរាប់ខាងលើ ការបន្ថយល្បឿននៃប្រភេទប្រអប់លេខ ទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតនៃប្រអប់លេខ ទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងចំនួនធ្មេញប្រអប់លេខ និងទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតទីលានយោង និងចំនួនធ្មេញប្រអប់លេខត្រូវបានតំណាងដោយ ខាងក្រោមពី [កន្សោម ៤១] ដល់ [កន្សោម ៤៣]។
| DGr=DGs+2×DGp | [កន្សោម ៤១] |
| ZGr=ZGs+2×ZGp | [កន្សោម ៤២] |
| DGr/ZGr=DGs/ZGs=DGp/ZGp | [កន្សោម ៤៣] |
ក្នុងករណីដែលចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍ 22, 23, ឧបករណ៍ព្រះអាទិត្យ 32, 33 និងឧបករណ៍ភព 42, 43 នៅពេលដែលទំនាក់ទំនងដែលបានបង្ហាញនៅក្នុង [កន្សោម 41] ទៅ [កន្សោម 43] ត្រូវបានពេញចិត្តត្រូវបានបញ្ជាក់ជាឯកសារយោង ចំនួនធ្មេញ "ចំនួនធ្មេញមានប្រសិទ្ធភាព» ត្រូវបានបង្ហាញថាជាភាពខុសគ្នារវាងចំនួនធ្មេញ និងលេខយោងនៃធ្មេញរបស់ឧបករណ៍នីមួយៗ។ នៅក្នុងយន្តការបំប្លែង 1 ដោយកំណត់ចំនួនធ្មេញដែលមានប្រសិទ្ធភាពនៃម្កុដមួយ 2 និងអ័ក្សព្រះអាទិត្យ 3 ទៅជាតម្លៃផ្សេងពី "0" នោះមកុដ 2 ឬអ័ក្សព្រះអាទិត្យ 3 អាចឆ្ពោះទៅមុខបាន។ នោះគឺនៅពេលដែលលេខយោងនៃធ្មេញរបស់ឧបករណ៍ចិញ្ចៀន 22, 23 ត្រូវបានតំណាងដោយលេខយោងនៃធ្មេញចិញ្ចៀន ZGR និងលេខយោងនៃធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យ 32, 33 ត្រូវបានតំណាងដោយលេខយោងនៃធ្មេញព្រះអាទិត្យ។ , ZGS ដោយកំណត់ចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍ 22, 23 ឬព្រះអាទិត្យហ្គែរ 32 , 33 ពីលក្ខខណ្ឌដែលមួយក្នុងចំណោម [កន្សោម 44] និង [កន្សោម 45] ពេញចិត្ត អ័ក្សមកុដ 2 ឬ ព្រះអាទិត្យ 3 អាចផ្លាស់ទីបកប្រែ។
នៅពេលដែល [កន្សោមលេខ 44] ពេញចិត្ត ស្ពាមកុដ 2 ផ្លាស់ទីទៅមុខ។ នៅពេលដែល [កន្សោម 45] ពេញចិត្ត អ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទៅមុខ។ វិធីសាស្ត្រកំណត់ដាច់ដោយឡែកមួយត្រូវបានបង្ហាញនៅក្នុង "ឧទាហរណ៍ដាច់ដោយឡែកនៃវិធីសាស្ត្រសម្រាប់កំណត់ចំនួនធ្មេញ និងចំនួនខ្សែស្រឡាយ។
"កំណត់ចំនួននៃការបង្វិលខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព"
នៅក្នុងយន្តការពន្យារភពផែនដី (យន្តការពន្យារប្រភេទខ្សែស្រឡាយភព) ដែលដូចគ្នាបេះបិទទៅនឹងយន្តការពន្យារប្រភេទឧបករណ៍ភពដែលបានរៀបរាប់ខាងលើ និងត្រូវបានបង្កើតឡើងដោយផ្នែកខ្សែស្រឡាយ annular ដែលត្រូវគ្នានឹងឧបករណ៍រោទិ៍ ដែលជាផ្នែកខ្សែស្រឡាយព្រះអាទិត្យដែលត្រូវគ្នានឹងឧបករណ៍ព្រះអាទិត្យ។ និងផ្នែកដែលមានខ្សែស្រឡាយរបស់ភពដែលត្រូវគ្នាទៅនឹងឧបករណ៍របស់ភព ពោលគឺនៅក្នុងយន្តការពន្យារប្រភេទខ្សែស្រឡាយភពដែលបន្ថយល្បឿនការបង្វិលដូចយន្តការពន្យារប្រភេទភពដែលបានរៀបរាប់ខាងលើដោយសារតែសំណាញ់នៃផ្នែកដែលមានខ្សែស្រឡាយ ទំនាក់ទំនងដែលតំណាងដោយដូចខាងក្រោមពី [កន្សោម 51] ទៅ [កន្សោម 53] ពេញចិត្ត។ [កន្សោម 51] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយ annular ផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ និងផ្នែកដែលមានខ្សែស្រឡាយភព។ [កន្សោម 52] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងចំនួនធ្មេញនៃផ្នែកខ្សែស្រឡាយ annular ផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ និងផ្នែកដែលមានខ្សែស្រឡាយភព។ [កន្សោម 53] តំណាងឱ្យទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតនៃទីលានយោង និងចំនួនធ្មេញនៃផ្នែកខ្សែស្រឡាយ annular, ផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ និងផ្នែកដែលមានខ្សែស្រឡាយភព។
| DBr=DBs+2×DBp | [កន្សោម ៥១] |
| ZBr=ZBs+2×ZBp | [កន្សោម ៥២] |
| DBr/ZBr=DBs/ZBs=DBp/ZBp | [កន្សោម ៥៣] |
DBr: អង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយ annular
DBs: អង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយពន្លឺព្រះអាទិត្យ
DBp: អង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយភព
ZBr: ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular
ZBs: ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រូបពន្លឺព្រះអាទិត្យ
ZBp: ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព
នៅក្នុងយន្តការបំប្លែង 1 យោងទៅតាមរូបតំណាងទីមួយ បានផ្តល់ថាយន្តការបន្ថយល្បឿនរបស់ភពទីមួយមានការកំណត់រចនាសម្ព័ន្ធដូចគ្នានឹងយន្តការនៃការបន្ថយល្បឿននៃប្រភេទខ្សែនៃភពដែលបានរៀបរាប់ខាងលើ សមាមាត្រដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយ សមាមាត្រដែលបានបង្កើតឡើងរវាង ចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ ហើយទំនាក់ទំនងដែលបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតនៃចំណុចយោង និងចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយត្រូវបានបង្ហាញដូចខាងក្រោមពី [កន្សោម 61] ដល់ [កន្សោម 63] ។
| DGr=DGs+2×DGp | [កន្សោម ៦១] |
| ZGr=ZGs+2×ZGp | [កន្សោម ៦២] |
| DGr/ZGr=DGs/ZGs=DGp/ZGp | [កន្សោម ៦៣] |
ក្នុងករណីដែលចំនួននៃការបង្វិលនៃផ្នែកខាងក្នុងនៃខ្សែស្រឡាយ 24 នៃរាងមកុដ 2 ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃអ័ក្សភព 4 នៅពេលដែលសមាមាត្រនៃខាងលើពី [Expression 61] ដល់ [Expression 63] ពេញចិត្ត ត្រូវបានចង្អុលបង្ហាញជាលេខយោងខ្សែស្រឡាយ "ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព" ត្រូវបានតំណាងថាជាភាពខុសគ្នារវាងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយនីមួយៗ និងលេខយោងនៃខ្សែស្រឡាយ។ នៅក្នុងយន្តការបំប្លែង 1 ដោយកំណត់ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាពនៃផ្នែកមួយនៃម្កុដ 2 និងអ័ក្សព្រះអាទិត្យ 3 ទៅជាតម្លៃផ្សេងពី "0" អ័ក្សមកុដ 2 ឬអ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទៅមុខ។ នោះគឺនៅពេលដែលលេខយោងនៃផ្នែកខ្សែស្រឡាយខាងក្នុង 24 នៃអ័ក្សព្រះអាទិត្យ 2 ត្រូវបានតំណាងដោយលេខយោងនៃខ្សែស្រឡាយ annular ZSR ហើយលេខយោងនៃខ្សែស្រឡាយផ្នែកខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានតំណាង។ ដោយលេខយោងនៃខ្សែស្រឡាយព្រះអាទិត្យ ZSS, មកុដ 2 ឬ shaft ព្រះអាទិត្យ 3 ឈានទៅមុខដោយកំណត់ចំនួននៃខ្សែស្រឡាយដូចជា [កន្សោម 64] និង [កន្សោម 65] ពេញចិត្ត។
នៅពេលដែល [កន្សោមលេខ 64] ពេញចិត្ត ស្ពាមកុដ 2 ផ្លាស់ទីទៅមុខ។ នៅពេលដែល [កន្សោម 65] ពេញចិត្ត អ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទៅមុខ។ វិធីសាស្ត្រកំណត់ដាច់ដោយឡែកមួយត្រូវបានបង្ហាញនៅក្នុង "ឧទាហរណ៍ដាច់ដោយឡែកនៃវិធីសាស្ត្រសម្រាប់កំណត់ចំនួនធ្មេញ និងចំនួនខ្សែស្រឡាយ។
នៅក្នុងយន្តការពន្យារប្រភេទឧបករណ៍ភពធម្មតា ចំនួននៃប្រអប់លេខភពគឺជាការបែងចែកនៃផលបូកនៃចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ និងចំនួនធ្មេញឧបករណ៍រោទិ៍។ ដូច្នេះចំនួននៃអ័ក្សភព 4 (លេខភព Np) នៅក្នុងយន្តការបំប្លែង 1 គឺជាការបែងចែកទូទៅនៃ "ការបែងចែកនៃផលបូកនៃចំនួននៃការប្រែខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs និងចំនួននៃវេននៃ annular នេះ។ ផ្នែកខ្សែស្រឡាយ ZSr” និង“ ការបែងចែកផលបូកនៃចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs និងចំនួនធ្មេញឧបករណ៍រោទិ៍ ZGr” ។
នៅក្នុងយន្តការបំប្លែងលេខ 1 ផ្នែកខ្សែស្រឡាយ និងប្រអប់លេខត្រូវបានភ្ជាប់ក្នុងពេលដំណាលគ្នាដោយកំណត់ចំនួនធ្មេញហ្គែរ ZGr ចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs និងចំនួនធ្មេញឧបករណ៍ភព ZGp (សមាមាត្រសរុបនៃចំនួនធ្មេញ ZGT) ទៅនឹងសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពរបស់ឧបករណ៍រោទិ៍ DGr អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃឧបករណ៍ព្រះអាទិត្យ DGs និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃឧបករណ៍ភព DGp (សមាមាត្រអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពសរុប ZST) ។ នោះគឺដោយការកំណត់ចំនួនធ្មេញប្រអប់លេខ និងចំនួនវេននៃផ្នែកដែលមានខ្សែស្រឡាយ ដូច្នេះទំនាក់ទំនងនៃ [កន្សោមលេខ 71] ខាងក្រោមត្រូវបានពេញចិត្ត ផ្នែកដែលមានខ្សែស្រឡាយ និងប្រអប់លេខត្រូវបានស្រោបក្នុងពេលដំណាលគ្នា។
| ZGr:ZGs:ZGp=DGr:DGs:DGp | [ពាក្យ ៧១] |
ទោះយ៉ាងណាក៏ដោយក្នុងករណីនេះចាប់តាំងពីដំណាក់កាលនៃការបង្វិលនៃអ័ក្សភព 4 គឺដូចគ្នាការចាប់ផ្តើមនិងចុងបញ្ចប់នៃសំណាញ់នៃប្រអប់លេខភព 42, 43, ring gears 22, 23 និង sun gears 32, 33 អមជាមួយការបង្វិល។ ស្របគ្នា។ នេះបណ្តាលឱ្យមានកម្លាំងបង្វិលជុំដោយសារតែការភ្ជាប់ប្រអប់លេខ ដែលអាចបង្កើនសំឡេងរំខាន និងកាត់បន្ថយអាយុកាលរបស់ប្រអប់លេខ។
នោះគឺនៅក្នុងយន្តការបំប្លែង 1 សមាមាត្រចំនួនធ្មេញសរុប ZGT និងអនុបាតអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពសរុប ZST ត្រូវបានកំណត់ទៅជាតម្លៃផ្សេងគ្នានៅក្នុងជួរដែលលក្ខខណ្ឌខាងក្រោម (A) ដល់ (C) ត្រូវបានពេញចិត្ត។ សមាមាត្រចំនួនធ្មេញសរុប ZGT និងសមាមាត្រអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពសរុប ZST អាចត្រូវបានកំណត់ទៅតម្លៃផ្សេងគ្នានៅក្នុងជួរដែលយ៉ាងហោចណាស់លក្ខខណ្ឌមួយ (A) ដល់ (C) ត្រូវបានពេញចិត្ត។
(ក) ក្នុងករណីដែលចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs ប្រសិនបើទំនាក់ទំនងក្នុង [សមីការ 71] ពេញចិត្តត្រូវបានបញ្ជាក់ជាលេខយោងនៃធ្មេញព្រះអាទិត្យ ZGSD ចំនួនពិតប្រាកដនៃធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs គឺខុសគ្នាពី លេខយោងនៃធ្មេញព្រះអាទិត្យ ZGSD ។
(ខ) ក្នុងករណីដែលចំនួនធ្មេញឧបករណ៍រោទិ៍ ZGr ប្រសិនបើទំនាក់ទំនងក្នុង [កន្សោមលេខ 71] ពេញចិត្តត្រូវបានបញ្ជាក់ជាលេខយោងនៃធ្មេញសង្វៀន ZGRD ចំនួនពិតប្រាកដនៃធ្មេញឧបករណ៍រោទិ៍ ZGr គឺខុសគ្នាពី លេខយោងនៃធ្មេញចិញ្ចៀន ZGRD ។
(គ) លេខភព Np គឺខុសពីអ្នកចែកលេខធ្មេញរបស់ភពផែនដី ZGp ពោលគឺលេខភព Np និងលេខធ្មេញរបស់ភពផែនដី ZGp មិនមានផ្នែកក្រៅពី "1" ទេ។
ចាប់តាំងពីវាសម្រេចបាននូវវិធីសាស្រ្តប្រតិបត្តិការដែលផ្នែកខ្សែស្រឡាយ និងសំណាញ់ដែកក្នុងពេលដំណាលគ្នា និងវិធីសាស្ត្រប្រតិបត្តិការដែលដំណាក់កាលបង្វិលនៃអ័ក្សភព 4 ខុសគ្នាពីគ្នាទៅវិញទៅមក កម្លាំងបង្វិលជុំដែលបណ្តាលមកពីសំណាញ់ប្រអប់លេខត្រូវបានបង្ក្រាប។
ចំណុចសំខាន់ៗដែលតំណាងឱ្យលក្ខខណ្ឌបច្ចេកទេសនៃយន្តការបំប្លែង 1 ត្រូវបានផ្តល់ឱ្យក្នុងចំណុចខាងក្រោម (A)-(I) ដែលរួមមានចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព និងចំនួនធ្មេញដែលមានប្រសិទ្ធភាព។
(ខ) សមាមាត្រខ្សែស្រឡាយព្រះអាទិត្យ/ភព
(ង) សមាមាត្រធ្មេញប្រអប់លេខ
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ
(ឆ) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព
(I) ចំនួនធ្មេញសកម្ម
ព័ត៌មានលម្អិតនៃចំណុចខាងលើនឹងត្រូវបានពិពណ៌នាដូចខាងក្រោម។
"របៀបបំប្លែងចលនា" នៅក្នុង (A) តំណាងឱ្យរបៀបប្រតិបត្តិការសម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។ នោះគឺនៅពេលដែលអ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទៅមុខតាមរយៈចលនាបង្វិលនៃអ័ក្សមកុដ 2 នោះរបៀបបំប្លែងចលនាគឺស្ថិតក្នុង "របៀបចលនារាងព្រះអាទិត្យ"។ នៅពេលអ័ក្សមកុដ 2 ឈានទៅមុខតាមរយៈចលនាបង្វិលនៃអ័ក្សព្រះអាទិត្យ 3 របៀបបំប្លែងចលនាគឺស្ថិតនៅក្នុង "របៀបចលនារាងរង្វង់"។
"សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ" នៅក្នុង (D) តំណាងឱ្យសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp និងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular ZSr. នោះគឺ "សមាមាត្រនៃចំនួនវេននៃផ្នែកខ្សែស្រឡាយ" គឺ "ZSs: ZSp: ZSr" ។
"សមាមាត្រធ្មេញប្រអប់លេខ" នៃ (E) តំណាងឱ្យសមាមាត្រនៃលេខធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs លេខធ្មេញឧបករណ៍ភព ZGp និងលេខធ្មេញរបស់ឧបករណ៍ចិញ្ចៀន ZGr ។ នោះគឺសមាមាត្រនៃចំនួនធ្មេញប្រអប់លេខគឺ ZGs:ZGp:ZGr ។
"សមាមាត្រអង្កត់ផ្ចិតដែលមានប្រសិទ្ធិភាពនៃផ្នែកខ្សែស្រឡាយ" នៃ (F) តំណាងឱ្យសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធិភាពនៃផ្នែកខ្សែស្រឡាយពន្លឺព្រះអាទិត្យ DSs អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដ៏មានប្រសិទ្ធិភាពនៃផ្នែកខ្សែស្រឡាយ annular DSr ។ នោះគឺសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកដែលមានខ្សែស្រឡាយគឺ DSs:DSp:DSr ។
"សមាមាត្រអង្កត់ផ្ចិតនៃប្រអប់លេខដែលមានប្រសិទ្ធិភាព" នៃ (G) តំណាងឱ្យសមាមាត្រនៃអង្កត់ផ្ចិតដ៏មានប្រសិទ្ធិភាពនៃ DGs ព្រះអាទិត្យ អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃប្រអប់លេខភព DGp និងអង្កត់ផ្ចិតដ៏មានប្រសិទ្ធភាពនៃឧបករណ៍រោទិ៍ DGr ។ នោះគឺសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃប្រអប់លេខគឺ DGs:DGp:DGr ។
"ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព" យោងទៅតាម (H) តំណាងឱ្យភាពខុសគ្នារវាងចំនួនខ្សែស្រឡាយពិតប្រាកដនៃផ្នែកដែលមានខ្សែស្រឡាយ (ចំនួននៃខ្សែស្រឡាយយោងទៅតាម (D)) និងលេខយោងនៃខ្សែស្រឡាយ។ នោះគឺនៅពេលដែលរបៀបបំប្លែងចលនាស្ថិតនៅក្នុងរបៀបចលនារាងព្រះអាទិត្យ ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃខ្សែស្រឡាយថាមពលព្រះអាទិត្យ ZSS ពីចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រូបពន្លឺព្រះអាទិត្យ ZSs នៅក្នុង (D)។ នៅពេលដែលរបៀបបំប្លែងចលនាស្ថិតនៅក្នុងរបៀបរំកិលអ័ក្ស annular ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃខ្សែស្រឡាយ annular ZSR ពីលេខខ្សែស្រឡាយនៃផ្នែក annular threaded ZSr ក្នុង (D)។
"ចំនួនធ្មេញដែលមានប្រសិទ្ធភាព" នៅក្នុង (I) តំណាងឱ្យភាពខុសគ្នារវាងចំនួនពិតនៃធ្មេញរបស់ឧបករណ៍ (ចំនួនធ្មេញក្នុង (E)) និងចំនួនធ្មេញយោង។ នោះគឺនៅពេលដែលរបៀបបំប្លែងចលនាស្ថិតនៅក្នុងរបៀបផ្លាស់ប្តូរអ័ក្សព្រះអាទិត្យ ចំនួននៃធ្មេញដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃធ្មេញព្រះអាទិត្យ ZGS ពីចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs នៅក្នុង (E)។ លើសពីនេះទៀតនៅពេលដែលរបៀបបំប្លែងចលនាស្ថិតនៅក្នុងរបៀបរំកិលអ័ក្សសង្វៀន ចំនួននៃធ្មេញដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃធ្មេញសង្វៀន ZGR ពីចំនួនធ្មេញក្រវិល ZGr ក្នុង (E)។
វិធីសាស្រ្តដំឡើងដាច់ដោយឡែកសម្រាប់ធាតុខាងលើឥឡូវនេះនឹងត្រូវបានបង្ហាញ។
ឧទាហរណ៍ 1 ការដំឡើង
(គ) ចំនួនអ័ក្សភព៖ "៤"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ “3:1:5”
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “៣១:៩:៤៥”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “3.44:1:5”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ “0”
(I) ចំនួនធ្មេញសកម្ម៖ "4"
ឧទាហរណ៍នៃការដំឡើង 2
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ "4: 1: 5"
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ “3:1:5”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “3.1:1:5”
ឧទាហរណ៍នៃការដំឡើង 3
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅទៅមុខ"
(គ) ចំនួននៃអ័ក្សរបស់ភព៖ "៩"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ "-5: 1: 5"
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “៣១:១០:៥០”
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ “3:1:5”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “3.1:1:5”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ “-8”
(I) ចំនួនធ្មេញសកម្ម៖ "1"
ឧទាហរណ៍នៃការដំឡើង 4
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួននៃភព: "11"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ "5: 1: 6"
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “39:10:60”
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ "4: 1: 6"
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “3.9:1:6”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ "1"
(I) ចំនួនធ្មេញសកម្ម៖ "-1"
ឧទាហរណ៍នៃការដំឡើង 5
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួននៃភព: "7"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ "2: 1: 5"
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “25:9:45”
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ “3:1:5”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “2.78:1:5”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ “-1”
(I) ចំនួនធ្មេញសកម្ម៖ "-2"
ឧទាហរណ៍នៃការដំឡើង 6
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួនអ័ក្សភព៖ "៥"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ “11:2:14”
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “58:11:77”
(F) សមាមាត្រអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ “6:1:8”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “5.8:1.1:7.7”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ "1"
(I) ចំនួនធ្មេញសកម្ម៖ "3"
ឧទាហរណ៍នៃការដំឡើង 7
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួននៃអ័ក្សរបស់ភព៖ "៩"
(ង) សមាមាត្រធ្មេញប្រអប់លេខ៖ “30:10:51”
(F) សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ៖ “3:1:5”
(G) សមាមាត្រអង្កត់ផ្ចិតប្រអប់លេខដែលមានប្រសិទ្ធភាព៖ “3:1:5.1”
(H) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ "1"
(I) ចំនួនធ្មេញសកម្ម៖ "1"
ដូចដែលបានរៀបរាប់ខាងលើ តំណាងទីមួយមានគុណសម្បត្តិដូចខាងក្រោម។
(1) ប្រតិបត្តិការ និងគុណសម្បត្តិនៃយន្តការបំប្លែង 1 យោងទៅតាមតំណាងទីមួយ នឹងត្រូវបានពិពណ៌នាបន្ថែម ដោយផ្អែកលើការប្រៀបធៀបជាមួយនឹងយន្តការបំប្លែងចលនាបង្វិល/បកប្រែ (យន្តការបំប្លែងចលនាមូលដ្ឋាន) ដែលបំពាក់ដោយអ័ក្សភព ដែលឧបករណ៍ភពខាងមុខ និង ឧបករណ៍ភពខាងក្រោយត្រូវបានបង្កើតឡើងជាផ្នែកសំខាន់មួយជាមួយនឹងលំនៅដ្ឋានអ័ក្សមេ។
នៅក្នុងយន្តការបំប្លែងចលនាជាមូលដ្ឋានខាងលើ ប្រសិនបើមានការផ្លាស់ប្តូរដំណាក់កាលបង្វិលរវាងឧបករណ៍រង្វង់ខាងមុខ និងឧបករណ៍រង្វង់ខាងក្រោយ អ័ក្សភពត្រូវបានរៀបចំរវាងអ័ក្សរង្វង់ និងអ័ក្សព្រះអាទិត្យក្នុងស្ថានភាពលំអៀងដោយគោរពតាមអ័ក្សកណ្តាលនៃ អ័ក្សព្រះអាទិត្យ (អ័ក្សរង្វង់) ស្របតាមការផ្លាស់ប្តូរដំណាក់កាល។ ដូច្នេះការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយរវាងមកុដ shaft ព្រះអាទិត្យ និង shafts ភព 4 ក្លាយជាមិនស្មើគ្នាដែលក្នុងតំបន់បង្កើនសម្ពាធរវាងផ្នែកខ្សែស្រឡាយនិង gears ។ ជាលទ្ធផលការពាក់ដែលបានធ្វើមូលដ្ឋានីយកម្មត្រូវបានបង្កឡើងដោយហេតុនេះកាត់បន្ថយអាយុកាលសេវាកម្មនៃយន្តការបំប្លែងនិងកាត់បន្ថយប្រសិទ្ធភាពនៃការបំប្លែងពីចលនារង្វិលទៅចលនាលីនេអ៊ែរដោយសារតែការពាក់កើនឡើង។
ផ្ទុយទៅវិញនៅក្នុងយន្តការបំប្លែង 1 យោងទៅតាមរូបធាតុទីមួយ អ័ក្សភព 4 ត្រូវបានបង្កើតឡើងដើម្បីអនុញ្ញាតឱ្យប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពខាងក្រោយ 43 បង្វិលទាក់ទងគ្នាទៅវិញទៅមក។ ដូច្នេះការផ្លាស់ប្តូរដំណាក់កាលរង្វិលរវាងឧបករណ៍រង្វង់ខាងមុខ 22 និងឧបករណ៍រង្វង់ខាងក្រោយ 23 ត្រូវបានស្រូប។ នោះគឺនៅពេលដែលការផ្លាស់ប្តូរដំណាក់កាលបង្វិលត្រូវបានបង្កឡើងរវាងឧបករណ៍រង្វង់ខាងមុខ 22 និងឧបករណ៍រង្វង់ខាងក្រោយ 23 ការផ្លាស់ប្តូរដំណាក់កាលបង្វិលត្រូវបានស្រូប។ ដោយការបង្វិលប្រអប់លេខភពខាងក្រោយនីមួយៗ 43 តួសំខាន់នៃអ័ក្សដែលទាក់ទងគ្នាដែលទាក់ទងគ្នា 41 (ការបង្វិលពាក់ព័ន្ធនៃឧបករណ៍ភពខាងមុខ 42 និងឧបករណ៍ភពខាងក្រោយ 43) ។ នេះរារាំងភាពលំអៀងនៃអ័ក្សភព 4 ដែលបណ្តាលមកពីភាពខុសប្រក្រតីរវាងដំណាក់កាលបង្វិលនៃឧបករណ៍រង្វង់ខាងមុខ 22 និងដំណាក់កាលបង្វិលនៃឧបករណ៍រង្វង់ខាងក្រោយ 23 ។ ដូច្នេះ ការភ្ជាប់ឯកសណ្ឋាននៃផ្នែកដែលមានខ្សែស្រឡាយ និងការភ្ជាប់ឯកសណ្ឋាននៃប្រអប់លេខរវាង ring shaft 2, sun shaft 3 និង planetary shafts 4 ត្រូវបានសម្រេច។ ជាលទ្ធផល អាយុកាលសេវាកម្មនៃយន្តការបំប្លែង 1 និងប្រសិទ្ធភាពនៃការបំប្លែងចលនាត្រូវបានធ្វើឱ្យប្រសើរឡើង។
(2) ដើម្បីទប់ស្កាត់ភាពលំអៀងនៃអ័ក្សភព 4 ឧទាហរណ៍យន្តការបំប្លែង 1 ត្រូវបានផលិតដូចដែលបានពិពណ៌នាខាងក្រោម។ នោះគឺនៅក្នុងដំណើរការផលិតនៃយន្តការបំប្លែងទី 1 អុហ្វសិតរវាងដំណាក់កាលបង្វិលនៃឧបករណ៍រង្វង់ខាងមុខ 22 និងដំណាក់កាលបង្វិលនៃឧបករណ៍រង្វង់ខាងក្រោយ 23 ត្រូវបានកាត់បន្ថយដោយការផ្សំសមាសធាតុរួមជាមួយនឹងការកែតម្រូវដំណាក់កាលបង្វិលនៃរង្វង់ខាងមុខ។ gear and the rear ring gear 23. ទោះយ៉ាងណាក៏ដោយ ក្នុងករណីនេះ ដោយសារដំណាក់កាលបង្វិលនៃ gears ត្រូវតែគ្រប់គ្រងយ៉ាងតឹងរ៉ឹង ផលិតភាពត្រូវបានកាត់បន្ថយ។ ជាងនេះទៅទៀត ការផ្លាស់ប្តូរដំណាក់កាលមិនអាចកាត់បន្ថយបានគ្រប់គ្រាន់ទេ បើទោះបីជាដំណាក់កាលបង្វិលនៃប្រអប់លេខត្រូវបានកែតម្រូវក៏ដោយ។ ដូច្នេះ វិធានការប្រឆាំងនេះមិនត្រូវបានគេពេញចិត្តទេ។
ផ្ទុយទៅវិញ យន្តការបំប្លែង 1 នៃធាតុទីមួយ ទទួលយកការកំណត់រចនាសម្ព័ន្ធដែលការផ្លាស់ប្តូរដំណាក់កាលបង្វិលត្រូវបានស្រូបយកដោយសារតែចលនាទាក់ទងនៃប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពខាងក្រោយ 43 ដូចដែលបានរៀបរាប់ខាងលើ។ ដូច្នេះការអនុវត្តត្រូវបានធ្វើឱ្យប្រសើរឡើងហើយភាពលំអៀងនៃអ័ក្សភព 4 ត្រូវបានបង្ក្រាបកាន់តែសមស្រប។
(3) នៅក្នុងអ័ក្សភពនីមួយៗ 4 នៃយន្តការបំប្លែងនៃធាតុទីមួយ ឧបករណ៍ភពខាងមុខ 42 និងផ្នែកខាងក្រៅ 44 ត្រូវបានបង្កើតឡើងជាផ្នែកសំខាន់មួយជាមួយនឹងតួសំខាន់នៃអ័ក្ស 41 ។ ជាលទ្ធផលក្នុងអំឡុងពេលនៃការផលិតនៃអ័ក្សភព 4 ប្រអប់ខាងមុខភព 42 និងផ្នែកខាងក្រៅ 44 អាចត្រូវបានរមៀលក្នុងពេលដំណាលគ្នាដែលធ្វើអោយប្រសើរឡើងនូវផលិតភាព។
(4) នៅក្នុងយន្តការបំប្លែង 1 នៃ embodiment ទីមួយ ទីតាំងរ៉ាឌីកាល់នៃអ័ក្សព្រះអាទិត្យ 3 ត្រូវបានកំណត់ដោយសំណាញ់នៃផ្នែកដែលមានខ្សែស្រឡាយ និងសំណាញ់នៃប្រអប់លេខ ការប្រណាំងខាងមុខ 51 និងការប្រណាំងខាងក្រោយ 52 ។ ទីតាំងរ៉ាឌីកាល់ នៃអ័ក្សភព 4 ត្រូវបានកំណត់ដោយសំណាញ់នៃផ្នែកដែលមានខ្សែស្រឡាយនិងសំណាញ់នៃប្រអប់លេខ។ ជាលទ្ធផល ដោយសារយន្តការបំប្លែង 1 ត្រូវបានបង្កើតឡើងដោយចំនួនអប្បរមានៃសមាសធាតុសម្រាប់ទប់លំនឹងអ័ក្សភព 4 នោះអ័ក្សរបស់ភព 4 ត្រូវបានទប់មិនឲ្យមានភាពលំអៀងទាក់ទងទៅនឹងទិសអ័ក្សនៃអ័ក្សព្រះអាទិត្យ 3 ឱ្យបានត្រឹមត្រូវ។
(5) នៅក្នុងយន្តការបំប្លែង 1 នៃធាតុទីមួយ ការប្រណាំងខាងមុខ 51 ត្រូវបានផ្តល់ជាមួយនឹងរន្ធប្រេង 51H ។ ដូច្នេះ ដោយសារប្រេងរំអិលអាចត្រូវបានផ្គត់ផ្គង់ទៅផ្នែកសំណាញ់នៃផ្នែក និងឧបករណ៍ដែលមានខ្សែស្រឡាយតាមរយៈរន្ធទឹករំអិល 51H នោះ អាយុកាលសេវាកម្មនៃផ្នែក និងឧបករណ៍ដែលមានខ្សែស្រឡាយត្រូវបានធ្វើឱ្យប្រសើរឡើង។ លើសពីនេះទៀត ដោយសារវត្ថុបរទេសនៅក្នុងយន្តការបំប្លែង 1 ត្រូវបានគេបោះចោល ដោយសារប្រេងរំអិលត្រូវបានផ្គត់ផ្គង់តាមរយៈរន្ធរំអិល 51H ការកាត់បន្ថយប្រសិទ្ធភាពនៃការបំប្លែង និងដំណើរការខុសប្រក្រតីដែលបណ្តាលមកពីវត្ថុបរទេសត្រូវបានបង្ក្រាប។
(6) នៅក្នុងយន្តការបំប្លែង 1 នៃធាតុទីមួយ សមាមាត្រចំនួនធ្មេញសរុប ZGT និងអនុបាតអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពសរុប ZST ត្រូវបានកំណត់ទៅជាតម្លៃផ្សេងគ្នានៅក្នុងជួរដែលលក្ខខណ្ឌ (A) ដល់ (C) ត្រូវបានពេញចិត្ត។ នេះសម្រេចបាននូវវិធីសាស្រ្តនៃការប្រតិបតិ្តការដែលការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយ និងការភ្ជាប់នៃប្រអប់លេខត្រូវបានសម្រេចក្នុងពេលដំណាលគ្នា និងវិធីសាស្រ្តនៃប្រតិបត្តិការដែលដំណាក់កាលបង្វិលនៃអ័ក្សភព 4 ខុសគ្នាពីគ្នាទៅវិញទៅមក។ នៅក្នុងវិធីនេះ កម្លាំងបង្វិលជុំដែលបណ្តាលមកពីការភ្ជាប់ប្រអប់លេខត្រូវបានបង្ក្រាប។ លើសពីនេះ សំឡេងរំខានក្នុងប្រតិបត្តិការត្រូវបានកាត់បន្ថយ ហើយអាយុកាលប្រើប្រាស់បានយូរក៏ត្រូវបានកែលម្អទៅតាមនោះដែរ។
តំណាងទីមួយអាចត្រូវបានកែប្រែដូចខាងក្រោម។
ជាការកំណត់រចនាសម្ព័ន្ធសម្រាប់ការអនុញ្ញាតឱ្យប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពខាងក្រោយ 43 បង្វិលទាក់ទងគ្នាទៅវិញទៅមក ធាតុទីមួយទទួលយកការកំណត់រចនាសម្ព័ន្ធដែលតួសំខាន់ 41 និងឧបករណ៍ភពខាងក្រោយ 43 ត្រូវបានបង្កើតឡើងដាច់ដោយឡែកពីគ្នា។ ទោះយ៉ាងណាក៏ដោយ វាអាចត្រូវបានកែប្រែដូចបានរៀបរាប់ខាងក្រោម។ តួសំខាន់ 41 ប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពក្រោយ 43 ត្រូវបានបង្កើតឡើងដាច់ដោយឡែក និងភ្ជាប់គ្នា ដូច្នេះធាតុផ្សំទាំងនេះបង្វិលទាក់ទងគ្នាទៅវិញទៅមក។ នេះអនុញ្ញាតឱ្យប្រអប់លេខភពខាងមុខ 42 និងប្រអប់លេខភពខាងក្រោយ 43 បង្វិលទាក់ទងគ្នាទៅវិញទៅមក។
យន្តការបំប្លែង 1 នៃធាតុទីមួយគឺជាយន្តការបំប្លែងដែលដំណើរការដោយផ្អែកលើគោលការណ៍ប្រតិបត្តិការខាងក្រោម។ នោះគឺចលនារង្វិលត្រូវបានបំប្លែងទៅជាចលនាលីនេអ៊ែរដោយសារតែភាពខុសគ្នារវាងមុំបង្វិលដែលបង្កើតឡើងស្របតាមភាពខុសគ្នារវាងសមាមាត្រនៃចំនួនធ្មេញ និងសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃអ័ក្សព្រះអាទិត្យ 3 ឬមកុដ។ shaft 2 ទៅ shafts ភព 4 នៅក្នុងប្រភេទនៃយន្តការ deceleration ភពពីរ។ ផ្ទុយទៅវិញ យន្តការបំប្លែងនៃអង្គធាតុដែលបានពិពណ៌នាខាងក្រោមគឺជាយន្តការបំប្លែងដែលដំណើរការដោយផ្អែកលើគោលការណ៍ប្រតិបត្តិការខាងក្រោម។ យន្តការបំប្លែងនៃវត្ថុតំណាងទីពីរគឺខុសពីយន្តការបំប្លែងទី 1 នៃវត្ថុតំណាងទីមួយ ដោយសារការកំណត់រចនាសម្ព័ន្ធដែលបានពិពណ៌នាខាងក្រោមត្រូវបានអនុម័ត ប៉ុន្តែការកំណត់រចនាសម្ព័ន្ធផ្សេងទៀតគឺដូចគ្នានឹងយន្តការបំប្លែងទី 1 នៃអង្គធាតុទីមួយដែរ។
នៅពេលដែលយន្តការបន្ថយល្បឿននៃប្រភេទប្រអប់លេខរបស់ភពផែនដីត្រូវបានបង្កើតឡើងដោយឧបករណ៍ព្រះអាទិត្យ ដោយសារទំនាក់ទំនងនៃទិសបង្វិលនៃប្រអប់លេខ បន្ទាត់ទំនោរធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យ និងបន្ទាត់ទំនោរធ្មេញរបស់ភពផែនដីត្រូវបានកំណត់ក្នុងទិសដៅផ្ទុយពីគ្នាទៅវិញទៅមក និងមុំបង្វិលនៃ ឧបករណ៍ត្រូវបានកំណត់ទៅបរិមាណដូចគ្នា។ លើសពីនេះ ប្រអប់លេខដែលមានមុំបង្វិលក្នុងទិសដៅដូចគ្នាទៅនឹងឧបករណ៍ភព ត្រូវបានគេប្រើជាឧបករណ៍រោទិ៍។
ដូច្នេះដើម្បីកំណត់រចនាសម្ព័ន្ធយន្តការបន្ថយល្បឿន (យន្តការបន្ថយល្បឿននៃប្រភេទខ្សែស្រឡាយភព) ដែលដូចគ្នានឹងយន្តការបន្ថយល្បឿននៃប្រភេទឧបករណ៍ភព ការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយ មុំកែងដំបូងនៃបន្ទាត់ helix នៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យដែលត្រូវគ្នា។ ទៅឧបករណ៍ព្រះអាទិត្យនៃផ្នែកខ្សែស្រឡាយភព ដែលត្រូវគ្នាទៅនឹងឧបករណ៍ភព ហើយផ្នែកខ្សែស្រឡាយ annular ដែលត្រូវគ្នានឹងឧបករណ៍ចិញ្ចៀនត្រូវបានកំណត់ទៅតម្លៃដូចគ្នា ហើយផ្នែកខ្សែស្រឡាយព្រះអាទិត្យមានផ្នែកខ្សែស្រឡាយក្នុងទិសដៅផ្ទុយ។ នៅក្នុងយន្តការពន្លឿនប្រអប់លេខដែលមានខ្សែស្រឡាយភពបែបនេះ ធាតុផ្សំទាំងពីរមិនត្រូវបានផ្លាស់ទីលំនៅតាមអ័ក្សទាក់ទងទៅនឹងសមាសភាគផ្សេងទៀតនោះទេ។ ទោះបីជាយ៉ាងណាក៏ដោយ បានផ្តល់ថាស្ថានភាពបែបនេះដែលចលនាទាក់ទងក្នុងទិសអ័ក្សមិនកើតឡើង ត្រូវបានគេសំដៅថាជារដ្ឋយោង នោះផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ឬផ្នែកដែលមានខ្សែស្រឡាយ annular អាចត្រូវបានផ្លាស់ទីលំនៅក្នុងទិសអ័ក្សដោយការផ្លាស់ប្តូរមុំទៅមុខនៃខ្សែស្រឡាយព្រះអាទិត្យ។ ផ្នែក ឬផ្នែកខ្សែស្រឡាយ annular ពីស្ថានភាពយោង រួមជាមួយនឹងការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយ។
ជាទូទៅសម្រាប់ផ្នែកដែលមានខ្សែស្រឡាយពីរដើម្បីភ្ជាប់យ៉ាងពេញលេញ រណ្តៅខ្សែស្រឡាយត្រូវកំណត់ទំហំដូចគ្នា។ លើសពីនេះ នៅក្នុងយន្តការបន្ថយល្បឿននៃប្រភេទ geared threaded gear របស់ភព ដើម្បីតម្រឹមមុំទៅមុខទាំងអស់នៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកខ្សែស្រឡាយភព និងផ្នែកខ្សែស្រឡាយ annular សមាមាត្រនៃអង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ។ ផ្នែកដែលមានខ្សែស្រឡាយរបស់ភព និងផ្នែកខ្សែស្រឡាយ annular ចាំបាច់ត្រូវកែតម្រូវទៅនឹងចំនួនសមាមាត្រនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកខ្សែស្រឡាយភព និងផ្នែកខ្សែស្រឡាយ annular ។
ដូច្នេះនៅក្នុងយន្តការបន្ថយល្បឿននៃប្រភេទប្រអប់លេខរបស់ភពផែនដី លក្ខខណ្ឌដែលមិនមានធាតុផ្សំណាមួយផ្លាស់ទីក្នុងទិសអ័ក្សគឺជាលក្ខខណ្ឌដូចខាងក្រោម (1)-(3):
(1) សមាមាត្រដែលមានតែផ្នែកខ្សែស្រលាយព្រះអាទិត្យ គឺជាខ្សែស្រឡាយបញ្ច្រាសក្នុងចំណោមផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកដែលមានខ្សែស្រឡាយភព និងផ្នែកខ្សែស្រឡាយ annular ។
(2) រណ្តៅខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកដែលមានខ្សែស្រឡាយភព និងផ្នែកខ្សែស្រឡាយ annular មានទំហំដូចគ្នា។
(3) សមាមាត្រនៃអង្កត់ផ្ចិតយោងនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកខ្សែស្រឡាយភព និងផ្នែកខ្សែស្រឡាយ annular គឺមានតម្លៃដូចគ្នាទៅនឹងសមាមាត្រនៃចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ផ្នែកខ្សែស្រឡាយភព និងផ្នែក។ ផ្នែកខ្សែស្រឡាយ annular ។
ផ្ទុយទៅវិញ នៅពេលដែលចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ឬផ្នែកខ្សែស្រឡាយ annular កើនឡើងពីចំនួនខ្សែស្រឡាយខាងលើ (2) ដោយចំនួនគត់នៃខ្សែស្រឡាយវិល នោះផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ឬផ្នែកខ្សែស្រឡាយ annular ផ្លាស់ទីក្នុង ទិសដៅអ័ក្សទាក់ទងទៅនឹងផ្នែកផ្សេងទៀតដែលមានខ្សែ។ ដូច្នេះ តំណាងទីពីរឆ្លុះបញ្ចាំងពីគំនិតខាងលើនៅក្នុងការកំណត់រចនាសម្ព័ន្ធនៃយន្តការបំប្លែង 1 ។ នេះអនុញ្ញាតឱ្យយន្តការបំប្លែង 1 ដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។
នៅពេលដែលរបៀបផ្លាស់ទីអ័ក្សព្រះអាទិត្យត្រូវបានអនុវត្ត យន្តការបំប្លែង 1 ត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីបំពេញលក្ខខណ្ឌដូចខាងក្រោម (A)-(D) ។ នៅពេលដែលរបៀបរំកិលអ័ក្សរោទ៍ត្រូវបានអនុវត្ត យន្តការបម្លែង 1 ត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីបំពេញលក្ខខណ្ឌដូចខាងក្រោម (A) ទៅ (C) និង (E)៖
(ក) ទិសបត់នៃផ្នែកអំបោះខាងក្រៅ ៣៤ នៃអ័ក្សព្រះអាទិត្យ ៣ គឺទល់មុខនឹងទិសបង្វិលនៃផ្នែកអំបោះខាងក្រៅ ៤៤ នៃអ័ក្សភព ៤ ។
(ខ) ទិសរមួលនៃផ្នែកខាងក្នុងនៃខ្សែស្រលាយ 24 នៃផ្នែកខាងក្រោន 2 គឺដូចគ្នាទៅនឹងទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃអ័ក្សភព 4 ។
(គ) រណ្តៅខ្សែស្រឡាយនៃមកុដ 2, អ័ក្សព្រះអាទិត្យ 3 និង shafts ភព 4 គឺដូចគ្នាបេះបិទ។
(ឃ) ទាក់ទងទៅនឹងទំនាក់ទំនងរវាងអង្កត់ផ្ចិតទីលានយោងនិងចំនួននៃខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយនៃមកុដ shaft 2, shafts ព្រះអាទិត្យ 3 និង shafts ភព 4, បានផ្តល់ថាទំនាក់ទំនងនៅពេលដែលគ្មានមកុដ shaft 2, ព្រះអាទិត្យ shaft 3 និងអ័ក្សភព 4 គឺជាកម្មវត្ថុនៃការផ្លាស់ទីលំនៅដែលទាក់ទងគ្នាក្នុងទិសដៅអ័ក្សត្រូវបានចង្អុលបង្ហាញជាសមាមាត្រយោងចំនួននៃខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 គឺធំជាងឬតិចជាងចំនួនខ្សែស្រឡាយនៅក្នុងសមាមាត្រយោង។ ដោយចំនួនគត់។
(ង) ទាក់ទងទៅនឹងទំនាក់ទំនងរវាងអង្កត់ផ្ចិតយោង និងចំនួននៃខ្សែស្រឡាយនៃផ្នែកនៃម្កុដ 2, អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 បានផ្តល់ថាទំនាក់ទំនងនៅពេលដែលគ្មានមកុដ 2 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 គឺជាកម្មវត្ថុនៃការផ្លាស់ទីលំនៅដែលទាក់ទងនៅក្នុងទិសអ័ក្សត្រូវបានចង្អុលបង្ហាញជាសមាមាត្រយោងចំនួននៃខ្សែស្រឡាយខាងក្នុងនៃផ្នែកខាងក្នុង 24 នៃមកុដអ័ក្ស 2 គឺធំជាងឬតិចជាងចំនួនខ្សែស្រឡាយនៅក្នុងសមាមាត្រយោង។ ដោយចំនួនគត់។
នៅក្នុងយន្តការបំប្លែង 1 បានផ្តល់ថាមិនមានការផ្លាស់ទីលំនៅដែលទាក់ទងគ្នាក្នុងទិសអ័ក្សរវាងអ័ក្សអ័រគីដេ 2 អ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ទំនាក់ទំនងដែលតំណាងដោយ [កន្សោម 81] ត្រូវបានបង្កើតឡើងរវាងអង្កត់ផ្ចិតទីលានយោង និង ចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ។
| DSr:DSs:DSp=ZSr:ZSs:ZSp | [កន្សោម ៨១] |
ក្នុងករណីដែលចំនួននៃខ្សែស្រឡាយវេននៃផ្នែកខាងក្នុង 24 នៃរាងមកុដ 2 ផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃអ័ក្សភព 4 នៅពេលដែលសមាមាត្រនៃ [ការបញ្ចេញមតិ 81] ពេញចិត្តត្រូវបានសន្មតថាជា "ចំនួនសេចក្តីយោងនៃខ្សែស្រឡាយវេន" ហើយភាពខុសគ្នារវាងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយនិងចំនួនយោងនៃខ្សែស្រឡាយត្រូវបានសន្មតថាជា "ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព" មកុដ។ shaft 2 ឬ shaft ព្រះអាទិត្យ 3 អាចផ្លាស់ទីទៅមុខនៅក្នុងយន្តការបំប្លែង 1 ដោយកំណត់ "ចំនួននៃខ្សែស្រឡាយមានប្រសិទ្ធិភាព" មួយនៃ shaft មកុដ 2 និង shaft ព្រះអាទិត្យ 3 ទៅតម្លៃក្រៅពី "0" ។ នោះគឺនៅពេលដែលលេខយោងនៃផ្នែកខ្សែស្រឡាយខាងក្នុង 24 នៃអ័ក្សព្រះអាទិត្យ 2 ត្រូវបានចង្អុលបង្ហាញថាជាលេខយោងនៃខ្សែស្រឡាយ annular ZSR ហើយលេខយោងនៃខ្សែស្រឡាយផ្នែកខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 គឺ ចង្អុលបង្ហាញជាលេខយោងនៃខ្សែស្រឡាយព្រះអាទិត្យ ZSS អ័ក្សមកុដ 2 ឬ The sun shaft 3 ត្រូវបានផ្លាស់ប្តូរទៅមុខដោយកំណត់ចំនួនខ្សែស្រឡាយដូចជា [កន្សោម 82] និង [កន្សោម 83] ខាងក្រោមត្រូវបានពេញចិត្ត។
វិធីសាស្ត្រកំណត់ដាច់ដោយឡែកមួយនឹងត្រូវបានផ្តល់ឱ្យនៅក្នុង "ឧទាហរណ៍ដាច់ដោយឡែកនៃវិធីសាស្ត្រសម្រាប់កំណត់ចំនួននៃការបង្វិលខ្សែស្រឡាយ។"
ធាតុសំខាន់ៗដែលតំណាងឱ្យលក្ខណៈជាក់លាក់នៃយន្តការបំប្លែង 1 នៃតំណាងទីពីររួមមានធាតុខាងក្រោម (A) ដល់ (E) រួមទាំងសមាមាត្រអង្កត់ផ្ចិតនៃទ្រនិចយោង និងចំនួនសមាមាត្រធ្មេញ។
(ក) របៀបបំប្លែងចលនា
(ខ) សមាមាត្រនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព
(គ) ចំនួននៃអ័ក្សភព
(ឃ) សមាមាត្រនៃលេខខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ
(ង) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព
ព័ត៌មានលម្អិតនៃធាតុខាងលើនឹងត្រូវបានពិពណ៌នាដូចខាងក្រោម។
"របៀបបំប្លែងចលនា" នៅក្នុង (A) តំណាងឱ្យរបៀបប្រតិបត្តិការសម្រាប់បំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។ នោះគឺនៅពេលដែលអ័ក្សព្រះអាទិត្យ 3 ផ្លាស់ទីទៅមុខតាមរយៈចលនាបង្វិលនៃអ័ក្សមកុដ 2 នោះរបៀបបំប្លែងចលនាគឺស្ថិតក្នុង "របៀបរំកិលអ័ក្សព្រះអាទិត្យ"។ បន្ថែមពីលើនេះទៀត នៅពេលដែលអ័ក្សក្រោន 2 ឆ្ពោះទៅមុខតាមរយៈចលនាបង្វិលនៃអ័ក្សព្រះអាទិត្យ 3 នោះ របៀបបំប្លែងចលនាគឺស្ថិតនៅក្នុង "របៀបរំកិលអ័ក្សរង្វង់"។
"សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភពផែនដី" នៃ (B) តំណាងឱ្យសមាមាត្រទិសដៅបង្វិលរវាងផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃអ័ក្សភព 4 ។ នោះគឺនៅពេលដែលទិសដៅបង្វិលនៃ ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងទិសដៅបង្វិលនៃផ្នែកខាងក្រៅ ផ្នែកដែលមានខ្សែស្រឡាយ 44 នៃអ័ក្សភព 4 គឺផ្ទុយពីគ្នាទៅវិញទៅមក សមាមាត្រនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភពគឺ "ទិសដៅបញ្ច្រាស" ។ លើសពីនេះទៀតនៅពេលដែលទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅ 34 នៃអ័ក្សព្រះអាទិត្យ 3 និងទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅ 44 នៃអ័ក្សភព 4 គឺដូចគ្នាទៅនឹងគ្នាទៅវិញទៅមក សមាមាត្រនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ / ភពគឺ "ទិសដៅទៅមុខ" ។
"ចំនួននៃអ័ក្សភព" នៅក្នុង (C) តំណាងឱ្យចំនួននៃអ័ក្សភព 4 ដែលមានទីតាំងនៅជុំវិញអ័ក្សព្រះអាទិត្យ 3 ។
"សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ" នៅក្នុង (D) តំណាងឱ្យសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp និងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular ZSr. នោះគឺសមាមាត្រនៃចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយគឺ ZSs: ZSp: ZSr ។
"ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព" នៅក្នុង (E) តំណាងឱ្យភាពខុសគ្នារវាងចំនួនខ្សែស្រឡាយពិតប្រាកដនៃផ្នែកដែលមានខ្សែស្រឡាយ (ចំនួនខ្សែស្រឡាយក្នុង (D)) និងលេខយោងនៃខ្សែស្រឡាយ។ នោះគឺនៅពេលដែលរបៀបបំប្លែងចលនាស្ថិតនៅក្នុងរបៀបចលនារាងព្រះអាទិត្យ ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃខ្សែស្រឡាយថាមពលព្រះអាទិត្យ ZSS ពីចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រូបពន្លឺព្រះអាទិត្យ ZSs នៅក្នុង (D)។ លើសពីនេះទៀតនៅពេលដែលរបៀបបំប្លែងចលនាគឺនៅក្នុងរបៀបរំកិលអ័ក្ស annular ចំនួននៃខ្សែស្រឡាយដែលមានប្រសិទ្ធភាពគឺជាតម្លៃដែលទទួលបានដោយការដកលេខយោងនៃខ្សែស្រឡាយ annular, ZSR, ពីលេខខ្សែស្រឡាយនៃផ្នែក annular threaded, ZSr, ក្នុង (D).
ឧទាហរណ៍ 1 ការដំឡើង
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលអ័ក្សព្រះអាទិត្យ”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួននៃអ័ក្សរបស់ភព៖ "៩"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ "4: 1: 5"
(F) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ "1"
ឧទាហរណ៍នៃការដំឡើង 2
(ក) របៀបបំប្លែងចលនា៖ “របៀបរំកិលរាងចិញ្ចៀន”
(ខ) សមាមាត្រផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ/ភព៖ "ទិសដៅបញ្ច្រាស"
(គ) ចំនួននៃអ័ក្សរបស់ភព៖ "៩"
(ឃ) សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយ៖ “3:1:6”
(ង) ចំនួនខ្សែស្រឡាយដែលមានប្រសិទ្ធភាព៖ "1"
យន្តការបំប្លែងលេខ 1 នៃអង្គធាតុទីពីរប្រើវិធីសាស្ត្រកំណត់ខាងក្រោមសម្រាប់ចំនួនធ្មេញ និងអង្កត់ផ្ចិតយោងនៃប្រអប់លេខ និងចំនួននៃការបង្វិលខ្សែស្រឡាយ និងអង្កត់ផ្ចិតយោងនៃផ្នែកដែលមានខ្សែស្រឡាយ។
[A] អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃប្រអប់លេខភព DGp ត្រូវបានកំណត់ទៅទំហំដូចគ្នា។ លើសពីនេះទៀតសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp និងចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍ ZGr ត្រូវបានកំណត់ទៅទំហំដូចគ្នាជាមួយនឹងសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃ ផ្នែកខ្សែស្រឡាយ annular DSr. ដូច្នេះសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ភព ZGp និងចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍ ZGr គឺស្មើនឹងសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp និងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយ annular ។ ZSr. ដូច្នេះសមាមាត្រនៃចំនួនបង្វិលនៃអ័ក្សសង្វៀន 2 និងអ័ក្សភព 4 ត្រូវបានកំណត់យ៉ាងជាក់លាក់ដោយសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍សង្វៀន 22, 23 និងប្រអប់លេខភព 42, 43 ។ លើសពីនេះទៅទៀត សមាមាត្រនៃ អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយ annular DSr ត្រូវបានរក្សាដោយគោរពតាមអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាព ដែលត្រូវតែកំណត់ដំបូង។
[B] អង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃប្រអប់លេខភព DGp ត្រូវបានកំណត់ទៅទំហំដូចគ្នា។ លើសពីនេះទៀតសមាមាត្រនៃចំនួនធ្មេញឧបករណ៍ភព ZGp និងចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs ត្រូវបានកំណត់ទៅទំហំដូចគ្នាជាមួយនឹងសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ DSs ។ . ដូច្នេះសមាមាត្រនៃចំនួនធ្មេញរបស់ភពផែនដី ZGp និងចំនួនធ្មេញឧបករណ៍ព្រះអាទិត្យ ZGs គឺស្មើនឹងសមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ZSp និងចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ ZSs ។ ដូច្នេះសមាមាត្រចំនួនបង្វិលនៃអ័ក្សព្រះអាទិត្យ 3 និងអ័ក្សភព 4 ត្រូវបានកំណត់យ៉ាងជាក់លាក់ដោយសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យ 32, 33 និងប្រអប់លេខរបស់ភព 42, 43 ។ លើសពីនេះទៅទៀត សមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាព។ នៃផ្នែកខ្សែស្រឡាយភព DSp និងអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យ DSs ត្រូវបានរក្សានៅសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាព ដែលត្រូវតែកំណត់ដំបូង។
ដូចដែលបានរៀបរាប់ខាងលើ យន្តការបំប្លែង 1 យោងទៅតាមតំណាងទីពីរមានគុណសម្បត្តិដែលដូចគ្នាទៅនឹងកត្តានៃ (1) ទៅ (4) និង (5) នៃ embodiment ទីមួយ។
តំណាងទីពីរអាចត្រូវបានកែប្រែដូចដែលនឹងត្រូវបានពិពណ៌នាខាងក្រោម។
នៅក្នុងតំណាងទីពីរ ឧបករណ៍រង្វង់ខាងមុខ 22 និង/ឬឧបករណ៍រង្វង់ខាងក្រោយ 23 ប្រហែលជាមិនត្រូវបានប្រើទេ។ នោះគឺ ការកំណត់រចនាសម្ព័ន្ធអាចត្រូវបានកែប្រែ ដូចជាប្រអប់លេខភពខាងមុខ 42 និង/ឬប្រអប់លេខភពខាងក្រោយ 43 មិនជាប់ជាមួយ សង្វៀន ២.
នៅក្នុងតំណាងទីពីរ ប្រអប់លេខព្រះអាទិត្យខាងមុខ 32 និង/ឬប្រអប់លេខព្រះអាទិត្យខាងក្រោយ 33 អាចនឹងមិនត្រូវបានប្រើប្រាស់នោះទេ។ មានន័យថា ការកំណត់រចនាសម្ព័ន្ធអាចត្រូវបានកែប្រែ ដូចជាប្រអប់លេខភពខាងមុខ 42 និង/ឬប្រអប់លេខភពខាងក្រោយ 43 មិនជាប់ជាមួយ ព្រះអាទិត្យ 3.
ទាមទារ
1. យន្តការបំប្លែងចលនារង្វិល/បកប្រែ ដែលរួមមានៈ
annular shaft មានចន្លោះលាតសន្ធឹងក្នុងទិសអ័ក្សមួយ, shaft annular រួមទាំងផ្នែកខ្សែស្រឡាយខាងក្នុងនិងឧបករណ៍ចិញ្ចៀនទីមួយនិងទីពីរ, ring gears ជាឧបករណ៍ខាងក្នុង,
ផ្លុំព្រះអាទិត្យមួយដែលត្រូវបានបោះចោលនៅក្នុងអ័ក្ស annular និងរួមទាំងផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ និងឧបករណ៍ព្រះអាទិត្យទីមួយ និងទីពីរ ឧបករណ៍ព្រះអាទិត្យគឺជាឧបករណ៍ខាងក្រៅ និង
រាងជាច្រើននៃភពដែលបោះចោលជុំវិញអ័ក្សព្រះអាទិត្យ ដែលនីមួយៗរួមមានផ្នែកខាងក្រៅ និងឧបករណ៍ភពទីមួយ និងទីពីរ ឧបករណ៍ភពគឺជាឧបករណ៍ខាងក្រៅ។
ឯផ្នែកខ្សែស្រឡាយខាងក្រៅនៃសំណាញ់រាងភពនីមួយៗ ជាមួយនឹងផ្នែកខាងក្នុងនៃអ័ក្សរង្វង់ និងជាមួយផ្នែកខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ សំណាញ់ភពទីមួយនីមួយៗមានសំណាញ់ជាមួយឧបករណ៍ចិញ្ចៀនទីមួយ និងឧបករណ៍ព្រះអាទិត្យទីមួយ ឧបករណ៍ភពទីពីរនីមួយៗ Meshes ជាមួយឧបករណ៍ចិញ្ចៀនទីពីរ និងទីពីរ a sun gear ម្ល៉ោះយន្តការបំប្លែងបំប្លែងចលនារង្វិលនៃអ័ក្ស annular មួយ និង shaft ព្រះអាទិត្យទៅជាចលនាបកប្រែនៃ annular shaft និង sun shaft តាមអ័ក្ស ទិសដៅដោយសារតែចលនារបស់ភពផែនដី
នៅក្នុងនោះ អ័ក្សភពត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីផ្តល់ការបង្វិលទាក់ទងគ្នារវាងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរ។
2. យន្តការបំប្លែងយោងតាមការអះអាងទី 1 ដែលក្នុងនោះអ័ក្សភពនីមួយៗត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួសំខាន់នៃអ័ក្សភពដែលបង្កើតបានជាអាំងតេក្រាលជាមួយនឹងផ្នែកខាងក្រៅ និងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរដែលបង្កើតឡើងដាច់ដោយឡែកពីអ័ក្សភពផែនដី។ តួនៃតួទីពីរ ឧបករណ៍ភពត្រូវបានរចនាឡើងដើម្បីបង្វិលទាក់ទងទៅនឹងតួសំខាន់នៃអ័ក្សភព។
3. យន្តការបំប្លែងនេះបើយោងតាមការអះអាងទី 1 ដែលក្នុងនោះអ័ក្សភពនីមួយៗត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួសំខាន់នៃអ័ក្សភពជាមួយនឹងផ្នែកខាងក្រៅ ហើយឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរដែលត្រូវបានបង្កើតឡើងដាច់ដោយឡែកពីអ័ក្សរបស់ភព។ តួសំខាន់ ដែលនៅក្នុងឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរ គឺអាចបង្វិលបានទាក់ទងទៅនឹងតួសំខាន់នៃអ័ក្សភព។
4. យន្តការបំប្លែងយោងតាមការអះអាងទី 1 ដែលក្នុងនោះ អ័ក្ស annular នីមួយៗត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃតួសំខាន់នៃអាំងតេក្រាល។ តួសំខាន់នៃអ័ក្សរាងជារង្វង់ ដែលក្នុងនោះឧបករណ៍រោទិ៍ទីមួយ និងឧបករណ៍ចិញ្ចៀនទីពីរអាចបង្វិលបានទាក់ទងទៅនឹងតួសំខាន់នៃអ័ក្សភព។
5. យន្តការបំប្លែងនេះបើយោងតាមការអះអាងទី 1 ដែលក្នុងនោះផ្នែកខាងក្នុងនៃខ្សែសង្វាក់ ឧបករណ៍រោទិ៍ទីមួយ និងឧបករណ៍រង្វង់ទីពីរនៃអ័ក្សចិញ្ចៀនត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីផ្លាស់ទីជាមួយគ្នា។
6. យន្តការបំប្លែងយោងតាមការអះអាងទី 1 ដែលក្នុងនោះ អ័ក្សព្រះអាទិត្យត្រូវបានបង្កើតឡើងដោយការរួមបញ្ចូលគ្នានៃផ្នែកសំខាន់នៃអ័ក្សព្រះអាទិត្យដែលបង្កើតបានជាអាំងតេក្រាលជាមួយនឹងផ្នែកខ្សែស្រឡាយខាងក្រៅ និងឧបករណ៍ព្រះអាទិត្យទីមួយ ហើយឧបករណ៍ព្រះអាទិត្យទីពីរត្រូវបានបង្កើតឡើងដាច់ដោយឡែកពីអ័ក្សព្រះអាទិត្យចម្បង។ តួ ដែលនៅក្នុងឧបករណ៍ព្រះអាទិត្យទីពីរ ឧបករណ៍ត្រូវបានកំណត់រចនាសម្ព័ន្ធដើម្បីផ្លាស់ទីទាក់ទងទៅនឹងតួសំខាន់នៃ shaft ពន្លឺព្រះអាទិត្យ។
7. យន្តការបំប្លែងយោងតាមការអះអាងទី 1 ដែលក្នុងនោះផ្នែកខាងក្រៅនៃខ្សែស្រលាយ ឧបករណ៍ព្រះអាទិត្យទីមួយ និងឧបករណ៍ព្រះអាទិត្យទីពីរនៃប៉ែលព្រះអាទិត្យអាចចល័តបានជាមួយគ្នា។
8. យន្តការបំប្លែងយោងតាមការអះអាង 1 ម្ល៉ោះនៅពេលដែលសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍រោទិ៍នីមួយៗ ចំនួនធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យនីមួយៗ និងចំនួនធ្មេញរបស់ឧបករណ៍ភពនីមួយៗត្រូវបានបញ្ជាក់ជាសមាមាត្រនៃចំនួន នៃធ្មេញ និងសមាមាត្រនៃអង្កត់ផ្ចិតទីលានយោងរបស់ឧបករណ៍រោទិ៍នីមួយៗ អង្កត់ផ្ចិតទីលានយោងនៃឧបករណ៍ព្រះអាទិត្យនីមួយៗ និងអង្កត់ផ្ចិតទីលានយោងនៃឧបករណ៍ភពនីមួយៗត្រូវបានបញ្ជាក់ជាសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាព សមាមាត្រនៃចំនួនធ្មេញ។ ហើយសមាមាត្រនៃអង្កត់ផ្ចិតដែលមានប្រសិទ្ធភាពត្រូវបានកំណត់ទៅតម្លៃផ្សេងគ្នា។
9. យន្តការបំប្លែងនៃពាក្យបណ្តឹងទី 1 ដែលក្នុងនោះទីតាំងរ៉ាឌីកាល់នៃអ័ក្សព្រះអាទិត្យត្រូវបានកំណត់ដោយសមាជិកសត្វខ្លាឃ្មុំដែលភ្ជាប់ទៅនឹងអ័ក្ស annular ការភ្ជាប់នៃផ្នែកដែលមានខ្សែស្រឡាយ និងការភ្ជាប់នៃប្រអប់លេខ និងទីតាំងរ៉ាឌីកាល់នៃអ័ក្សភព។ ត្រូវបានកំណត់ដោយការភ្ជាប់នៃផ្នែកខ្សែស្រឡាយ និងការភ្ជាប់នៃប្រអប់លេខ។
10. យន្តការបំប្លែងយោងតាមការអះអាងទី 9 ដែលធាតុរបស់សត្វខ្លាឃ្មុំគឺជាសត្វខ្លាឃ្មុំមួយគូដែលភ្ជាប់ទៅនឹងអ័ក្សអញ្ចាញ ដើម្បីគ្របដណ្ដប់តំបន់ចំហរនៅចុងអ័ក្សអញ្ចាញ ហើយធាតុទ្រនាប់ត្រូវបានផ្តល់ជាមួយនឹងរន្ធសម្រាប់ផ្គត់ផ្គង់ប្រេងរំអិលដល់សំណាញ់។ ផ្នែកនៃផ្នែកដែលមានខ្សែស្រោប និងផ្នែកនៃសំណាញ់ប្រអប់លេខរវាងអ័ក្ស annular shaft, solar shaft និង planetary shaft។
11. យន្តការបំប្លែងយោងតាមការអះអាងទី 1 ដែលឧបករណ៍រង្វង់ទីមួយ និងឧបករណ៍រង្វង់ទីពីរមានរូបរាងដូចគ្នា ឧបករណ៍ព្រះអាទិត្យទីមួយ និងឧបករណ៍ព្រះអាទិត្យទីពីរមានរូបរាងដូចគ្នា ហើយឧបករណ៍ភពទីមួយ និងឧបករណ៍ភពទីពីរមាន រូបរាងដូចគ្នា។
12. យន្តការបំប្លែងយោងទៅតាមការអះអាង 11 ម្ល៉ោះនៅពេលដែលចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្រៅនៃអ័ក្សភពត្រូវបានចង្អុលបង្ហាញថាជាចំនួននៃខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ។ អ័ក្សព្រះអាទិត្យត្រូវបានចង្អុលបង្ហាញថាជាចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យចំនួនធ្មេញរបស់ឧបករណ៍ភពត្រូវបានចង្អុលបង្ហាញជាចំនួនធ្មេញរបស់ឧបករណ៍ភពហើយចំនួនធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យត្រូវបានចង្អុលបង្ហាញជាចំនួននៃ ធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យ សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយព្រះអាទិត្យទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយភពគឺខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ព្រះអាទិត្យទៅនឹងចំនួនធ្មេញរបស់ភព។ ឧបករណ៍,
13. យន្តការបំប្លែងនេះបើយោងតាមការអះអាង 11 ម្ល៉ោះនៅពេលដែលចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្រៅនៃអ័ក្សភពត្រូវបានចង្អុលបង្ហាញថាជាចំនួននៃខ្សែស្រឡាយនៃផ្នែកខ្សែស្រឡាយភព ចំនួននៃខ្សែស្រឡាយនៃផ្នែកខាងក្រៅនៃខ្សែស្រឡាយ។ annular shaft ត្រូវបានចង្អុលបង្ហាញថាជាចំនួននៃខ្សែស្រឡាយនៃផ្នែក annular threaded ចំនួននៃ planetary gear gear ត្រូវបានបញ្ជាក់ជាចំនួនធ្មេញរបស់ planetary gear ហើយចំនួនធ្មេញរបស់ ring gear ត្រូវបានបញ្ជាក់ជាចំនួនធ្មេញរបស់ ឧបករណ៍រោទិ៍ សមាមាត្រនៃចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែសង្វាក់ទៅនឹងចំនួនខ្សែស្រឡាយនៃផ្នែកដែលមានខ្សែស្រឡាយភពគឺខុសគ្នាពីសមាមាត្រនៃចំនួនធ្មេញរបស់ឧបករណ៍ចិញ្ចៀនទៅនឹងចំនួនធ្មេញរបស់ឧបករណ៍ភព។
ក្នុងករណីនេះ អ័ក្សព្រះអាទិត្យផ្លាស់ទីដោយបកប្រែដោយសារតែចលនារបស់ភពនៃអ័ក្សរបស់ភពដែលអមជាមួយនឹងចលនាបង្វិលនៃអ័ក្ស annular ។
14. យន្តការបំប្លែងយោងតាមការអះអាងណាមួយពី 1 ដល់ 10 ដែលក្នុងនោះទិសបង្វិលនៃផ្នែកខាងក្នុងនៃអ័ក្សអ័រគីដេ និងទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សភពគឺស្ថិតនៅក្នុងទិសដៅដូចគ្នាទៅនឹងគ្នាទៅវិញទៅមក។ ទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ និងទិសបង្វិល ផ្នែកខាងក្រៅនៃអ័ក្សភពគឺនៅក្នុងទិសដៅផ្ទុយទៅគ្នាទៅវិញទៅមក និងផ្នែកខាងក្នុងនៃអ័ក្សអ័ក្ស ដែលជាផ្នែកខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ។ ហើយផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សភពមានរណ្តៅខ្សែស្រឡាយដូចគ្នានឹងអ្វីផ្សេងទៀត
លើសពីនេះទៅទៀត ក្នុងករណីដែលសមាមាត្រនៃអង្កត់ផ្ចិតនៃចំនុចយោង និងចំនួននៃការបង្វិលនៃផ្នែកខ្សែស្រឡាយនៃអ័ក្ស annular, shafts ព្រះអាទិត្យ និង planetary shafts ប្រសិនបើចលនាទាក់ទងក្នុងទិសអ័ក្សមិនកើតឡើងរវាង shaft annular នោះ ព្រះអាទិត្យ shaft និង planetary shafts ត្រូវបានចង្អុលបង្ហាញជាសមាមាត្រយោង ហើយចំនួននៃ threaded នៃផ្នែកខាងក្រៅនៃ shaft នៃ shaft គឺខុសគ្នាពីចំនួន threads នៅក្នុង support ratio និង
ក្នុងករណីនេះ អ័ក្សព្រះអាទិត្យផ្លាស់ទីបកប្រែដោយសារតែចលនារបស់ភពផែនដី អមដោយចលនារង្វិលនៃអ័ក្ស annular ។
15. យន្តការបំប្លែងយោងតាមការអះអាងណាមួយពី 1 ដល់ 10 ដែលក្នុងនោះ ទិសបង្វិលនៃផ្នែកខាងក្នុងនៃអ័ក្សអ័រគីដេ និងទិសបង្វិលនៃផ្នែកខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សភពគឺស្ថិតនៅក្នុងទិសដៅដូចគ្នាទៅនឹងគ្នាទៅវិញទៅមក។ ទិសរមួលនៃផ្នែកខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ និងទិសបង្វិល ផ្នែកខាងក្រៅនៃអ័ក្សភពគឺស្ថិតនៅក្នុងទិសដៅផ្ទុយគ្នាទៅវិញទៅមក ដែលក្នុងនោះផ្នែកខាងក្នុងនៃអ័ក្សព្រះអាទិត្យ ផ្នែកដែលមានខ្សែស្រឡាយខាងក្រៅនៃអ័ក្សព្រះអាទិត្យ។ ហើយផ្នែកខាងក្រៅនៃអ័ក្សភពមានរណ្តៅខ្សែស្រឡាយដូចគ្នាទៅនឹងផ្នែកផ្សេងទៀត
លើសពីនេះទៅទៀត ក្នុងករណីដែលសមាមាត្រនៃអង្កត់ផ្ចិតនៃចំនុចយោង និងចំនួននៃការបង្វិលនៃផ្នែកខ្សែស្រឡាយនៃអ័ក្ស annular, shafts ព្រះអាទិត្យ និង planetary shafts ប្រសិនបើចលនាទាក់ទងក្នុងទិសអ័ក្សមិនកើតឡើងរវាង shaft annular នោះ ព្រះអាទិត្យ shaft និង planetary shaft ត្រូវបានចង្អុលបង្ហាញជាសមាមាត្រយោង ហើយចំនួននៃចំនួននៃការបង្វិលខ្សែស្រឡាយនៃផ្នែកខាងក្នុងនៃ shaft annular ខុសគ្នាពីចំនួននៃ thread turns ក្នុងសមាមាត្រទ្រទ្រង់។
ក្នុងករណីនេះ អ័ក្សអ័រគីដេ ផ្លាស់ទីបកប្រែដោយសារចលនារបស់ភពផែនដី អមដោយចលនាបង្វិលនៃអ័ក្សព្រះអាទិត្យ។
មហាវិទ្យាល័យដឹកជញ្ជូន និងគ្រប់គ្រងផ្លូវ Lipetsk
ការងារស្រាវជ្រាវរបស់សិស្សនៃក្រុម K2-14
ប្រធានបទ៖ ការសិក្សាអំពីប្រតិបត្តិការនៃយន្តការបំប្លែងចលនា
Lipetsk
ឆ្នាំសិក្សា 2015/2016
មាតិកា
1. សេចក្តីផ្តើម (មូលដ្ឋានគ្រឹះប្រវត្តិសាស្ត្រនៃបញ្ហានៃការផ្លាស់ប្តូរចលនា)
2. ភាពពាក់ព័ន្ធនៃការស្រាវជ្រាវ (ធម្មជាតិអនុវត្តនៃសម្មតិកម្ម)
3. គោលបំណងនៃការសិក្សា
3. វិធីសាស្រ្តនិងវិធីសាស្រ្តនៃការងារស្រាវជ្រាវ
6. សេចក្តីសន្និដ្ឋាន និងសំណូមពរ
7. ការបង្ហាញគម្រោង
1 ។ សេចក្ដីណែនាំ
យន្តការសម្រាប់បំប្លែងចលនា
ទិដ្ឋភាពសង្ខេបនៃប្រវត្តិនៃការអភិវឌ្ឍន៍យន្តការសាមញ្ញ
យោងតាមការចាត់ថ្នាក់ដែលមាននៅក្នុងមេកានិច DPE ជាកម្មសិទ្ធិរបស់ក្រុមគ្រួសារនៃយន្តការសាមញ្ញបំផុតដែលបានបម្រើមនុស្សដោយស្មោះត្រង់អស់ជាច្រើនសតវត្សមកហើយ ដូចជាកង់ ប្លុក ដងថ្លឹង និងច្រកទ្វារ។
ពួកគេទាំងអស់ត្រូវបានផ្តល់ឱ្យដើមចូលទៅក្នុងសកម្មភាពដោយថាមពលសាច់ដុំរបស់មនុស្សហើយតម្លៃជាក់ស្តែងរបស់ពួកគេស្ថិតនៅក្នុងការគុណច្រើន (ការពង្រឹង) នៃឥទ្ធិពលសាច់ដុំដើម។ យន្តការទាំងនេះនីមួយៗបានឆ្លងកាត់ការសាកល្បងដ៏យូរនៃការអនុវត្ត និងពេលវេលា ហើយតាមពិតពួកវាបានក្លាយទៅជាប្រភេទនៃ "ឥដ្ឋ" (តំណភ្ជាប់បឋម) ដែលយន្តការស្មុគស្មាញជាច្រើនត្រូវបានបង្កើតឡើង។ ជាការពិតណាស់កង់កាន់កាប់កន្លែងពិសេសក្នុងចំណោមយន្តការទាំងនេះ; ព្រោះវាជាជំនួយរបស់គាត់ ដែលវាត្រូវបានគេអនុវត្តបន្ត ការបំប្លែងថាមពលមេកានិកដោយប្រើប្រាស់ជាប្រភពទំនាញ។
យើងកំពុងនិយាយជាការពិតអំពីកម្មវិធីបម្លែងគេស្គាល់ថាជារហាត់ទឹក ដែលក្រោយមកបានក្លាយជាទួរប៊ីនធារាសាស្ត្រ (ដែលបង្កើនប្រសិទ្ធភាពនៃយន្តការដោយបន្សល់ទុកនូវគោលការណ៍ប្រតិបត្តិការដដែល)។
ឡាទីស៊ីមុសការប្រើប្រាស់ឧបករណ៍បំលែងប្រភេទនេះត្រូវបានពន្យល់យ៉ាងសាមញ្ញ៖ ឧត្តមគតិរបស់វា។ភាពឆបគ្នា។ (ក្នុងករណីសាមញ្ញបំផុត - តាមរយៈអ័ក្សធម្មតាមួយនៃការបង្វិល) ជាមួយនឹងសំខាន់បំផុតថ្មកិន ហើយបន្ទាប់មក -ម៉ាស៊ីនភ្លើង .


វាក៏គួរឱ្យចាប់អារម្មណ៍ផងដែរក្នុងការប្រើកង់ទឹកនៅក្នុង "បញ្ច្រាស (បញ្ច្រាស) ធ្វើឱ្យសកម្ម" សម្រាប់កើនឡើង ទឹកដោយប្រើ "បញ្ចូល" កម្លាំងសាច់ដុំរបស់មនុស្ស។

ទោះយ៉ាងណាក៏ដោយ មិនមែនបន្ទុកទាំងអស់មានលក្ខណៈបង្វិលទេ (ឧទាហរណ៍សម្រាប់ជាងដែកដ៏មានឥទ្ធិពលឧបករណ៍បំលែងប្រភេទច្រាសនឹងសមជាង) ហើយបន្ទាប់មក ចាំបាច់ត្រូវងាកទៅរកឧបករណ៍បំប្លែងកម្រិតមធ្យម (ដូចជាយន្តការ crank) ដែលណែនាំការខាតបង់ទៅក្នុងដំណើរការបំប្លែង និងបង្កើនភាពស្មុគស្មាញ និងថ្លៃដើម។ប្រព័ន្ធ។ យើងរកឃើញឧទាហរណ៍ជាច្រើននៃតម្រូវការក្នុងការប្រើឧបករណ៍បំប្លែងកម្រិតមធ្យមក្នុងអំឡុងការផ្លាស់ប្តូរពីចលនាបង្វិលទៅចលនាច្រាសមកវិញនៅក្នុងគំនូរបុរាណ និងការឆ្លាក់។
ជាឧទាហរណ៍ តួរលេខខាងក្រោមបង្ហាញពីការរួបរួមនៃការបង្វិលរហាត់ទឹកជាមួយនឹងស្នប់ piston - បន្ទុកមេកានិចដែលតម្រូវឱ្យមានចលនាច្រាសមកវិញនៃយន្តការដ្រាយ។

ដូច្នេះអត្ថប្រយោជន៍និងភាពពាក់ព័ន្ធនៃ
សម្រាប់ការអនុវត្តជាក់ស្តែងជាច្រើន។ឧបករណ៍បំលែងថាមពលប្រភេទ reciprocating ដែលជំរុញដោយកម្លាំងទំនាញដូចគ្នា។
យន្តការសាមញ្ញសមរម្យបំផុត។នៅក្នុងករណីនេះគឺដៃចង្កូត។
អានុភាព, ក្នុងន័យពេញលេញ- ឧបករណ៍ពង្រីកកម្លាំង។ ដូច្នេះវាបានរកឃើញកម្មវិធីទូលំទូលាយក្នុងការលើកទម្ងន់ឧទាហរណ៍នៅក្នុងការសាងសង់ (ឧទាហរណ៍បុរាណ- ការសាងសង់ពីរ៉ាមីតដោយជនជាតិអេហ្ស៊ីប) ។ ទោះយ៉ាងណាក៏ដោយនៅក្នុងកម្មវិធីនេះ
ឥទ្ធិពល "បញ្ចូល" គឺសាច់ដុំដូចគ្នា។កិច្ចខិតខំប្រឹងប្រែងរបស់មនុស្ស និងរបៀបនៃប្រតិបត្តិការនៃដងថ្លឹង ជាការពិតគឺដាច់ពីគ្នា។
មានការអនុវត្តជាក់ស្តែងគួរឱ្យចាប់អារម្មណ៍មួយទៀតឧទាហរណ៍នៃការប្រើប្រាស់ដងថ្លឹងឧបករណ៍បំលែងថាមពល៖ នេះគឺជាម៉ាស៊ីនបោះប្រយុទ្ធបុរាណ -trebuchet ។

Trebuchet គួរឱ្យចាប់អារម្មណ៍ដោយសារតែភាពខុសគ្នាជាមូលដ្ឋានថ្មីរបស់វាពីការប្រើប្រាស់បុរាណនៃ lever: វាត្រូវបានធ្វើឱ្យសកម្មរួចហើយទំនាញ (និងមិនមែនដោយកម្លាំងសាច់ដុំ) នៃម៉ាស់ធ្លាក់ចុះ។ ទោះយ៉ាងណាក៏ដោយវាមិនអាចទទួលស្គាល់ trebuchet ថាជាឧបករណ៍បំលែងថាមពលដែលមានសមត្ថភាពភ្ជាប់បន្ទុកបានទេ។ ទីមួយនេះគឺជាយន្តការនៃសកម្មភាពតែមួយ (ម្តង) ហើយទីពីរដើម្បីសាកវា (លើកបន្ទុក) កម្លាំងសាច់ដុំដូចគ្នាគឺត្រូវបានទាមទារ (ទោះបីជាត្រូវបានពង្រឹងដោយជំនួយពីប្លុកនិងច្រកទ្វារក៏ដោយ) ។
ទោះជាយ៉ាងណាក៏ដោយ គំនិតច្នៃប្រឌិតកំពុងស្វែងរកវិធីថ្មីក្នុងការព្យាយាមភ្ជាប់ដងថ្លឹងជាមួយនឹងបន្ទុក ហើយប្រើទំនាញផែនដីជាកម្លាំង។កម្លាំងជំរុញដើម។
យន្តការបំប្លែងចលនា៖ rack និង pinion, វីស, crank, rocker, cam ។ ព័ត៌មានលម្អិត លក្ខណៈ និងលក្ខណៈនៃការប្រើប្រាស់ដែលបានបម្រុងទុកនៅក្នុងសាខាផ្សេងៗនៃផលិតកម្ម និងឧស្សាហកម្មធុនស្រាល។ គ្រោងការណ៍នៃប្រតិបត្តិការរបស់ពួកគេនៅក្នុងម៉ាស៊ីនផ្សេងៗ។
ដើម្បីធ្វើឱ្យអង្គធាតុដំណើរការសកម្ម ក៏ដូចជាការបំប្លែងប្រភេទនៃចលនាមួយទៅជាមួយទៀត យន្តការ crank, cam និងយន្តការផ្សេងទៀតត្រូវបានប្រើប្រាស់។
យន្តការ crank ។ យន្តការបែបនេះបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ។ ចង្កឹះដែលមានចង្កឹះបង្វិលក្នុងទ្រនាប់ស្ថានីនៃស៊ុមភ្ជាប់ដោយហ៊ីងទៅចុងម្ខាងនៃដំបងតភ្ជាប់។ ចុងម្ខាងទៀតនៃដំបងតភ្ជាប់ត្រូវបានភ្ជាប់ដោយ hinge ទៅនឹងឧបករណ៍រំកិលរអិលនៅក្នុងមគ្គុទ្ទេសក៍ត្រង់ថេរ។ ប្រសិនបើ crank បង្វិលជាបន្តបន្ទាប់ គ្រាប់រំកិលធ្វើចលនាច្រាសមកវិញ។ ក្នុងអំឡុងពេលបដិវត្តន៍មួយនៃ crank គ្រាប់រំកិលធ្វើចលនាពីរ - ដំបូងក្នុងទិសដៅមួយហើយបន្ទាប់មកក្នុងទិសដៅផ្ទុយ។
យន្តការ crank ត្រូវបានប្រើនៅក្នុងម៉ាស៊ីនចំហាយ, ម៉ាស៊ីនចំហេះខាងក្នុង, ម៉ាស៊ីនបូមពីស្តុង, ល. ទីតាំងនៃ crank នៅចំណុចកំពូលនៃការដាច់សរសៃឈាមខួរក្បាលបកប្រែត្រូវបានគេហៅថាមជ្ឈមណ្ឌលស្លាប់។ ដើម្បីផ្លាស់ទី crank ទៅទីតាំងនេះ នៅពេលដែលវាគឺជាតំណភ្ជាប់ឈានមុខគេនៃយន្តការ flywheel មួយត្រូវបានរចនាឡើង - កង់ដែលមានគែមធ្ងន់ដែលបានម៉ោននៅលើ crankshaft ។ ថាមពល kinetic នៃ flywheel ធានានូវចលនាបន្តនៃយន្តការ crank ។
យន្តការកាមេរ៉ា។ យន្តការបែបនេះបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែក្នុងប្រភេទផ្សេងៗនៃម៉ាស៊ីនស្វ័យប្រវត្តិ ម៉ាស៊ីនកាត់ដែក និងម៉ាស៊ីនផ្សេងទៀត។ កាមេរ៉ាបង្វិលជុំវិញអ័ក្ស ផ្តល់ចលនាច្រាសទៅកាន់អ្នករុញ។
ចលនារបស់ pushrod អាស្រ័យលើទម្រង់ cam ។ ប្រសិនបើទម្រង់ cam តំណាងឱ្យធ្នូនៃរង្វង់ដែលបានពិពណ៌នាពីកណ្តាល នោះអ្នករុញនៅក្នុងផ្នែកនេះនឹងនៅស្ថានី។ យន្តការ cam បែបនេះត្រូវបានគេហៅថារាបស្មើ។
ការបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ
យន្តការរ៉ុក
យន្តការខេម
យន្តការនៃដៃចង្កូត
យន្តការ crank
យន្តការ crank បម្រើដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាច្រាសមកវិញ និងច្រាសមកវិញ។ ផ្នែកសំខាន់នៃយន្តការ crank គឺ: crank shaft, rod connecting and a slider, connect to each other by hinge (a) ។ ប្រវែងដាច់សរសៃឈាមខួរក្បាលរបស់គ្រាប់រំកិលអាចមានប្រវែងណាមួយ វាអាស្រ័យលើប្រវែងនៃ crank (កាំ)។ ប្រសិនបើយើងកំណត់ប្រវែងនៃ crank ដោយអក្សរ A និង stroke នៃ slider ដោយ B នោះយើងអាចសរសេររូបមន្តសាមញ្ញមួយ៖ 2A = B ឬ A = B/2 ។ ដោយប្រើរូបមន្តនេះ វាងាយស្រួលក្នុងការស្វែងរកទាំងប្រវែងដាច់សរសៃឈាមខួរក្បាលនៃគ្រាប់រំកិល និងប្រវែងនៃ crank ។ ឧទាហរណ៍៖ ការដាច់សរសៃឈាមខួរក្បាលរបស់គ្រាប់រំកិល B = 50 mm អ្នកត្រូវស្វែងរកប្រវែងនៃ crank A. ការជំនួសតម្លៃលេខទៅក្នុងរូបមន្ត យើងទទួលបាន៖ A = 50/2 = 25 mm នោះគឺជាប្រវែងនៃ crank គឺ 25 mm ។

a - គោលការណ៍ប្រតិបត្តិការនៃយន្តការ crank,
ខ - ចង្កឹះលេខតែមួយ គ - អ័ក្សច្រាសច្រើន
g - យន្តការជាមួយ eccentric
នៅក្នុងយន្តការ crankshaft ត្រូវបានគេប្រើជាញឹកញាប់ជំនួសឱ្យ crank shaft ។ នេះមិនផ្លាស់ប្តូរខ្លឹមសារនៃយន្តការទេ។ crankshaft អាចមានកែងមួយឬច្រើន (b, c) ។
ការកែប្រែយន្តការ crank ក៏អាចជាយន្តការ eccentric (d) ផងដែរ។ យន្តការ eccentric មិនមាន crank ឬជង្គង់។ ជំនួសមកវិញ ថាសមួយត្រូវបានម៉ោននៅលើអ័ក្ស។ វាមិនត្រូវបានម៉ោននៅកណ្តាលនោះទេប៉ុន្តែអុហ្វសិត, នោះគឺ, eccentrically, ដូច្នេះឈ្មោះនៃយន្តការនេះ - eccentric ។
នៅក្នុងយន្តការ crank មួយចំនួន វាចាំបាច់ក្នុងការផ្លាស់ប្តូរប្រវែង stroke នៃគ្រាប់រំកិល។ នេះជាធម្មតាត្រូវបានធ្វើជាមួយ crankshaft មួយ។ ជំនួសឱ្យ crank កោងរឹង ថាសមួយ (បន្ទះមុខ) ត្រូវបានម៉ោននៅលើចុងនៃ shaft នេះ។ ស្នាមប្រេះ (ខ្សែរដែលដំបងតភ្ជាប់ត្រូវបានដាក់) ត្រូវបានបញ្ចូលទៅក្នុងរន្ធដែលធ្វើឡើងតាមកាំនៃបន្ទះមុខ។ តាមរយៈការផ្លាស់ទីតង់ដុងតាមរន្ធដោត ពោលគឺការផ្លាស់ទីវាឱ្យឆ្ងាយពីចំណុចកណ្តាល ឬនាំវាឱ្យកាន់តែជិតទៅវា យើងផ្លាស់ប្តូរទំហំនៃការដាច់សរសៃឈាមខួរក្បាលរបស់គ្រាប់រំកិល។
ការដាច់សរសៃឈាមខួរក្បាលរបស់គ្រាប់រំកិលនៅក្នុងយន្តការ crank គឺមិនស្មើគ្នា។ វាយឺតបំផុតនៅកន្លែងដែលមានប្រតិកម្ម។
យន្តការនៃដង្កៀប ប្រើក្នុងម៉ាស៊ីន ម៉ាស៊ីនបូមទឹក និងក្នុងម៉ាស៊ីនកសិកម្ម និងម៉ាស៊ីនផ្សេងៗទៀត។
យន្តការរ៉ុក
ចលនាច្រាសមកវិញនៅក្នុងយន្តការ crank អាចត្រូវបានបញ្ជូនដោយគ្មានដំបងតភ្ជាប់។ ការកាត់ត្រូវបានធ្វើឡើងនៅក្នុងគ្រាប់រំកិលដែលក្នុងករណីនេះត្រូវបានគេហៅថាគ្រាប់រំកិលឆ្លងកាត់ចលនារបស់គ្រាប់រំកិល។ ម្ជុល crank ត្រូវបានបញ្ចូលទៅក្នុងរន្ធនេះ។ នៅពេលដែល shaft បង្វិល crank ផ្លាស់ទីទៅឆ្វេងនិងស្តាំផ្លាស់ទីស្លាយជាមួយវា។

a - តំណភ្ជាប់បង្ខំ, b - eccentric ជាមួយ roller និទាឃរដូវ,
គ - តំណភ្ជាប់រញ្ជួយ
ជំនួសឱ្យស្លាយ អ្នកអាចប្រើដំបងដែលរុំក្នុងដៃអាវណែនាំ។ ដើម្បីឱ្យសមទៅនឹងឌីស eccentric ដំបងត្រូវបានបំពាក់ដោយនិទាឃរដូវសម្ពាធ។ ប្រសិនបើដំបងធ្វើការបញ្ឈរ ជួនកាលទំនាក់ទំនងរបស់វាត្រូវបានសម្រេចដោយទម្ងន់របស់វាផ្ទាល់។
សម្រាប់ចលនាកាន់តែប្រសើរឡើងនៅតាមបណ្តោយថាស, roller មួយត្រូវបានដំឡើងនៅចុងបញ្ចប់នៃដំបង។
យន្តការខេម
យន្តការ Cam បម្រើដើម្បីបំប្លែងចលនាបង្វិល (ខេម) ទៅជាចលនាច្រាស ឬប្រភេទផ្សេងទៀតនៃចលនា។ យន្តការនេះមាន cam មួយ - ថាសកោងមួយដែលបានម៉ោននៅលើអ័ក្សមួយ និងដំបងដែលនៅចុងម្ខាងស្ថិតនៅលើផ្ទៃកោងនៃឌីស។ ដំបងត្រូវបានបញ្ចូលទៅក្នុងដៃអាវណែនាំ។ ដើម្បីឱ្យសមល្អជាងមុនទៅនឹងកាមេរ៉ា ដំបងត្រូវបានបំពាក់ដោយនិទាឃរដូវសម្ពាធ។ ដើម្បីធ្វើឱ្យដំបងរអិលបានយ៉ាងងាយស្រួលនៅតាមបណ្តោយ cam, roller ត្រូវបានដំឡើងនៅចុងបញ្ចប់របស់វា។

ក - ខេមរាបស្មើ, ខ - ខេមដែលមានចង្អូរ, គ - ខេមប្រភេទស្គរ,
ឃ - កាមេរ៉ារាងបេះដូង ឃ - កាមេរ៉ាសាមញ្ញបំផុត។
ប៉ុន្តែមានឌីសខេមនៃការរចនាផ្សេងទៀត។ បន្ទាប់មករំកិលរំកិលមិននៅតាមបណ្តោយវណ្ឌវង្កនៃឌីសទេ ប៉ុន្តែតាមបណ្តោយចង្អូរកោងដែលយកចេញពីផ្នែកម្ខាងនៃឌីស (ខ)។ ក្នុងករណីនេះ និទាឃរដូវបង្ហាប់មិនត្រូវបានទាមទារទេ។ ចលនារបស់ roller ជាមួយដំបងទៅចំហៀងត្រូវបានអនុវត្តដោយ groove ខ្លួនវាផ្ទាល់។
បន្ថែមពីលើកាមេរ៉ាសំប៉ែត (ក) ដែលយើងពិនិត្យ អ្នកក៏អាចរកឃើញកាមេរ៉ាប្រភេទស្គរ (គ) ផងដែរ។ កាមេរ៉ាបែបនេះគឺជាស៊ីឡាំងដែលមានចង្អូរកោងជុំវិញរង្វង់របស់វា។ រមូរដែលមានដំបងត្រូវបានតំឡើងនៅក្នុងចង្អូរ។ កាមេរ៉ាបង្វិល ជំរុញ roller នៅក្នុងចង្អូរកោង ហើយដោយហេតុនេះ ផ្តល់ចលនាដែលចង់បានទៅដំបង។ កាមេរ៉ារាងស៊ីឡាំងមកមិនត្រឹមតែជាមួយចង្អូរប៉ុណ្ណោះទេ ថែមទាំងមានជ្រុងម្ខាងផងដែរ - ជាមួយនឹងទម្រង់ចុង។ ក្នុងករណីនេះ roller ត្រូវបានចុចប្រឆាំងនឹងទម្រង់ cam ដោយនិទាឃរដូវមួយ។
នៅក្នុងយន្តការ cam, swinging levers (c) ត្រូវបានគេប្រើជាញឹកញាប់ជំនួសឱ្យដំបង។ ដងថ្លឹងបែបនេះអនុញ្ញាតឱ្យអ្នកផ្លាស់ប្តូរប្រវែងនៃជំងឺដាច់សរសៃឈាមខួរក្បាលនិងទិសដៅរបស់វា។
ប្រវែងដាច់សរសៃឈាមខួរក្បាលនៃដំបងឬដងថ្លឹងនៃយន្តការ cam អាចត្រូវបានគណនាយ៉ាងងាយស្រួល។ វានឹងស្មើនឹងភាពខុសគ្នារវាងកាំតូចនៃ cam និងធំ។ ឧទាហរណ៍ប្រសិនបើកាំធំគឺ 30 មមហើយកាំតូចគឺ 15 នោះការដាច់សរសៃឈាមខួរក្បាលនឹងមាន 30-15 = 15 ម។ នៅក្នុងយន្តការមួយដែលមាន cam រាងស៊ីឡាំង ប្រវែងដាច់សរសៃឈាមខួរក្បាលគឺស្មើនឹងបរិមាណនៃការផ្លាស់ទីលំនៅរបស់ចង្អូរតាមបណ្តោយអ័ក្សស៊ីឡាំង។
ដោយសារតែយន្តការ cam ធ្វើឱ្យវាអាចទទួលបានចលនាធំទូលាយ ពួកវាត្រូវបានគេប្រើជាញឹកញាប់នៅក្នុងម៉ាស៊ីនជាច្រើន។ ចលនាចំរាស់ឯកសណ្ឋាននៅក្នុងម៉ាស៊ីនត្រូវបានសម្រេចដោយកាមេរ៉ាលក្ខណៈមួយ ដែលត្រូវបានគេហៅថារាងបេះដូង។ ដោយមានជំនួយពី cam បែបនេះ ប៊ូប៊ីននៃម៉ាស៊ីនដេរត្រូវបានរងរបួសស្មើៗគ្នា។
យន្តការនៃដៃចង្កូត
ជារឿយៗនៅក្នុងម៉ាស៊ីនវាចាំបាច់ដើម្បីផ្លាស់ប្តូរទិសដៅនៃចលនានៃផ្នែកខ្លះ។ ឧបមាថាចលនាកើតឡើងដោយផ្ដេក ប៉ុន្តែវាត្រូវតែត្រូវបានដឹកនាំបញ្ឈរ ទៅខាងស្តាំ ទៅខាងឆ្វេង ឬនៅមុំណាមួយ។ លើសពីនេះទៀត ជួនកាលប្រវែងដាច់សរសៃឈាមខួរក្បាលនៃដងថ្លឹងប្រតិបត្តិការត្រូវបង្កើន ឬបន្ថយ។ នៅក្នុងករណីទាំងអស់នេះ យន្តការដងថ្លឹងត្រូវបានប្រើប្រាស់។

តួរលេខបង្ហាញពីយន្តការដងថ្លឹងដែលភ្ជាប់ជាមួយយន្តការផ្សេងទៀត។ យន្តការដងថ្លឹងទទួលបានចលនារញ្ជួយពី crank ហើយបញ្ជូនវាទៅគ្រាប់រំកិល។ ប្រវែងដាច់សរសៃឈាមខួរក្បាលនៃយន្តការ lever hinged អាចត្រូវបានបង្កើនដោយការផ្លាស់ប្តូរប្រវែងដៃ lever ។ ដៃកាន់តែវែង វានឹងកាន់តែធំ ហើយដូច្នេះចំណីនៃផ្នែកដែលភ្ជាប់ជាមួយវា ហើយផ្ទុយទៅវិញ ដៃកាន់តែតូច ដាច់សរសៃឈាមខួរក្បាលកាន់តែខ្លី។

2. ភាពពាក់ព័ន្ធនៃការស្រាវជ្រាវ (ធម្មជាតិអនុវត្តនៃសម្មតិកម្ម)
ការធ្វើការជាមួយយន្តការផ្សេងៗបានក្លាយជាផ្នែកសំខាន់មួយនៃជីវិតរបស់យើងសព្វថ្ងៃនេះ។ យើងប្រើយន្តការបំប្លែងចលនាដោយមិនគិតពីរបៀបដែលពួកវាត្រូវបានអនុវត្ត និងមូលហេតុដែលពួកគេធ្វើឱ្យជីវិតរបស់យើងកាន់តែងាយស្រួល។
ភាពពាក់ព័ន្ធនៃប្រធានបទនៃការងាររបស់យើងត្រូវបានកំណត់ដោយការពិតដែលថាបច្ចុប្បន្នតួនាទីនៃយន្តការបែបនេះនៅក្នុងជីវិតសម័យទំនើបមិនត្រូវបានកោតសរសើរទាំងស្រុងទេនៅក្នុងដំណើរការនៃការបណ្តុះបណ្តាលក្នុងវិជ្ជាជីវៈរបស់យើងយន្តការបែបនេះមានសារៈសំខាន់។
នៅក្នុងពិភពសម័យទំនើប ការសិក្សាអំពីយន្តការបំប្លែងចលនាគឺជាផ្នែកមួយដ៏សំខាន់នៃវគ្គបណ្តុះបណ្តាលទាំងមូលសម្រាប់វិជ្ជាជីវៈ "ប្រតិបត្តិករស្ទូច" ចាប់តាំងពីការដឹងពីគោលការណ៍ជាមូលដ្ឋាននៃការប្រតិបត្តិនៃអង្គប្រតិបត្តិការ យន្តការលើក ប្រតិបត្តិការនៃចំហេះខាងក្នុង។ ម៉ាស៊ីន និងការផ្លាស់ប្តូរចលនានៅក្នុងតួរថយន្ត។ ដូច្នេះសម្មតិកម្មនៃការសិក្សារបស់យើងនឹងមានកំណែដូចខាងក្រោម។ជាមួយនឹងការសិក្សាសកម្មនៃប្រតិបត្តិការនៃយន្តការបែបនេះ ការងារជាក់ស្តែងលើប្រភេទផ្សេងៗនៃការអនុវត្តន៍ផលិតកម្មកាន់តែសកម្ម។ (ការបណ្តុះបណ្តាលការបើកបរក្នុងរថយន្ត ការអនុវត្តន៍អប់រំលើរថយន្តស្ទូច)
មនុស្សជាច្រើនចាប់អារម្មណ៍ និងងប់ងល់ក្នុងការសិក្សា ការរចនា និងគំរូយន្តការផ្សេងៗ រួមទាំងយន្តការបំប្លែងចលនាផងដែរ។
ប្រហែលជាមនុស្សគ្រប់រូបយ៉ាងហោចណាស់ម្តងក្នុងជីវិតរបស់គាត់បានគិតអំពីរបៀបធ្វើឱ្យជីវិតរបស់គាត់កាន់តែងាយស្រួល និងបង្កើតភាពងាយស្រួលចាំបាច់ក្នុងដំណើរការសម្ភារៈ ការគ្រប់គ្រងការដឹកជញ្ជូន សំណង់។
មនុស្សតែងតែចោទជាសំណួរជាច្រើនអំពីប្រតិបត្តិការនៃយន្តការបែបនេះ។ ដោយសិក្សាពីប្រវត្តិនៃបញ្ហានេះ យើងបានសន្និដ្ឋានថាយន្តការបែបនេះកំពុងត្រូវបានកែលម្អជាមួយនឹងការអភិវឌ្ឍន៍បច្ចេកវិទ្យា
3. គោលបំណងនៃការសិក្សា
គោលដៅនៃការងារ
គោលដៅនៃការងារ - សិក្សាថាតើយន្តការបំប្លែងចលនាមានតួនាទីអ្វីខ្លះនៅក្នុងបច្ចេកវិទ្យាទំនើប
គោលដៅចម្បងនៃការងារគឺដើម្បីឆ្លើយសំណួរថាហេតុអ្វីបានជាវាមានសារៈសំខាន់ក្នុងការសិក្សាលម្អិតអំពីយន្តការនៃការផ្លាស់ប្តូរចលនានៅក្នុងដំណើរការនៃការធ្វើជាម្ចាស់នៃវិជ្ជាជីវៈ "ប្រតិបត្តិករស្ទូច" យើងក៏ចង់បញ្ជាក់ថា ការសិក្សាសកម្មនៃម៉ាស៊ីន និងយន្តការបែបនេះ។ ជួយបំពេញការងារជាក់ស្តែងផ្សេងៗដោយជោគជ័យ។
4. គោលបំណងនៃការងារស្រាវជ្រាវ
ដើម្បីសម្រេចបាននូវគោលដៅនេះ យើងត្រូវដោះស្រាយភារកិច្ចដូចខាងក្រោមៈ
គោលបំណងការងារ៖
1. សិក្សាអក្សរសិល្ប៍លើប្រធានបទនៃយន្តការបំប្លែងចលនា
2. ស្វែងយល់ពីអត្ថន័យនៃពាក្យ យន្តការ crank យន្តការ cam យន្តការ hinge និងប្រភេទនៃយន្តការផ្សេងទៀត។
3. ស្វែងរកឧទាហរណ៍ក្នុងបច្ចេកវិទ្យា ជីវិតប្រចាំថ្ងៃ ប្រមូលសម្ភារៈសម្រាប់រៀបចំទិន្នន័យ បង្កើតគំរូនៃយន្តការ
4. សង្កេតមើលប្រតិបត្តិការនៃយន្តការបែបនេះនៅក្នុងការងារជាក់ស្តែង
5. ប្រៀបធៀបលទ្ធផលដែលទទួលបាន
6. គូរសេចក្តីសន្និដ្ឋានអំពីការងារដែលបានធ្វើ
5. មូលដ្ឋានគ្រឹះជាក់ស្តែងនៃការងារស្រាវជ្រាវ (គំរូ គម្រោង ការឧទាហរណ៍)
រូបថត
6. សេចក្តីសន្និដ្ឋាន និងសំណូមពរ
ការសិក្សាអាចមានប្រយោជន៍ និងគួរឱ្យចាប់អារម្មណ៍សម្រាប់និស្សិតនៃស្ថាប័នវិជ្ជាជីវៈដែលសិក្សាពីយន្តការបែបនេះ ក៏ដូចជាអ្នកដែលចាប់អារម្មណ៍លើបច្ចេកវិទ្យា។
ជាមួយនឹងការងាររបស់យើង យើងចង់ទាក់ទាញការយកចិត្តទុកដាក់របស់សិស្សចំពោះបញ្ហានៃការសិក្សាអំពីយន្តការនៃការផ្លាស់ប្តូរចលនា។
ក្នុងដំណើរការស្រាវជ្រាវ ពួកយើងទទួលបានបទពិសោធន៍... ខ្ញុំគិតថា ចំណេះដឹងដែលខ្ញុំទទួលបាននឹងអាចឱ្យខ្ញុំជៀសផុតពីកំហុសឆ្គង / ជួយខ្ញុំឱ្យបានត្រឹមត្រូវ...
លទ្ធផលនៃការសិក្សាធ្វើឱ្យខ្ញុំគិតថា...
អ្វីដែលធ្វើឱ្យខ្ញុំលំបាកបំផុតគឺ...
ការស្រាវជ្រាវបានផ្លាស់ប្តូរគំនិត/ការយល់ឃើញរបស់ខ្ញុំជាមូលដ្ឋានអំពី...
ការបញ្ជូនគឺជាឧបករណ៍បច្ចេកទេសសម្រាប់បញ្ជូនចលនាមួយ ឬប្រភេទផ្សេងទៀតពីផ្នែកមួយនៃយន្តការទៅផ្នែកមួយទៀត។ ការផ្ទេរកើតឡើងពីប្រភពថាមពលទៅកន្លែងនៃការប្រើប្រាស់ ឬការផ្លាស់ប្តូររបស់វា។ យន្តការបញ្ជូនដំបូងត្រូវបានបង្កើតឡើងនៅក្នុងពិភពបុរាណ ហើយត្រូវបានប្រើប្រាស់នៅក្នុងប្រព័ន្ធធារាសាស្រ្តនៃប្រទេសអេហ្ស៊ីបបុរាណ មេសូប៉ូតាមៀ និងប្រទេសចិន។ មេកានិចមជ្ឈិមសម័យបានធ្វើឱ្យប្រសើរឡើងយ៉ាងខ្លាំងនូវឧបករណ៍ដែលបញ្ជូនចលនា និងបង្កើតប្រភេទថ្មីជាច្រើន ដោយប្រើប្រាស់វានៅក្នុងកង់វិល និងគ្រឿងស្មូន។ ការរីកចំរើនពិតប្រាកដបានចាប់ផ្តើមនៅក្នុងសម័យទំនើបនេះ ជាមួយនឹងការណែនាំនៃបច្ចេកវិទ្យាផលិតកម្ម និងដំណើរការយ៉ាងជាក់លាក់នៃយ៉ាន់ស្ព័រដែក។
ប្រភេទផ្សេងៗនៃប្រអប់លេខត្រូវបានប្រើប្រាស់ក្នុងម៉ាស៊ីនផ្សេងៗ ឧបករណ៍ប្រើប្រាស់ក្នុងផ្ទះ រថយន្ត និងយន្តការផ្សេងៗទៀត។
ជាធម្មតា ប្រភេទនៃការបញ្ជូនខាងក្រោមត្រូវបានសម្គាល់៖ :
- ចលនាបង្វិល;
- rectilinear ឬ reciprocating;
- ចលនាតាមគន្លងជាក់លាក់មួយ។
ប្រភេទនៃការបញ្ជូនមេកានិចដែលប្រើយ៉ាងទូលំទូលាយបំផុតគឺ rotary ។
លក្ខណៈពិសេសនៃយន្តការប្រអប់លេខ
យន្តការបែបនេះត្រូវបានរចនាឡើងដើម្បីបញ្ជូនការបង្វិលពីឧបករណ៍មួយទៅឧបករណ៍មួយទៀតដោយប្រើសំណាញ់នៃធ្មេញ។ ពួកវាមានការបាត់បង់ការកកិតទាបបើប្រៀបធៀបទៅនឹងក្ដាប់ ចាប់តាំងពីកង់កង់មិនចាំបាច់ត្រូវចុចឱ្យជាប់គ្នាឡើយ។
ប្រអប់លេខមួយគូ បំប្លែងល្បឿននៃការបង្វិលអ័ក្សក្នុងសមាមាត្របញ្ច្រាសទៅនឹងសមាមាត្រនៃចំនួនធ្មេញ។ សមាមាត្រនេះត្រូវបានគេហៅថា។ ដូច្នេះកង់ដែលមានធ្មេញប្រាំនឹងបង្វិល 4 ដងលឿនជាងកង់ដែលមានធ្មេញ 20 ជាប់នឹងវា។ កម្លាំងបង្វិលជុំក្នុងគូបែបនេះក៏នឹងថយចុះ 4 ដង។ ទ្រព្យសម្បត្តិនេះត្រូវបានប្រើដើម្បីបង្កើតប្រអប់លេខដែលកាត់បន្ថយល្បឿនបង្វិលនៅពេលកម្លាំងបង្វិលជុំកើនឡើង (ឬផ្ទុយមកវិញ)។
ប្រសិនបើចាំបាច់ត្រូវទទួលបានសមាមាត្រប្រអប់លេខធំ នោះប្រអប់លេខមួយគូប្រហែលជាមិនគ្រប់គ្រាន់ទេ៖ ប្រអប់លេខនឹងមានទំហំធំណាស់។ បន្ទាប់មកគូបន្តបន្ទាប់គ្នាជាច្រើនត្រូវបានប្រើ ដែលនីមួយៗមានសមាមាត្រឧបករណ៍តូច។ ឧទាហរណ៍ធម្មតានៃប្រភេទនេះគឺប្រអប់លេខរថយន្ត ឬនាឡិកាមេកានិច។
យន្តការប្រអប់លេខក៏មានសមត្ថភាពផ្លាស់ប្តូរទិសដៅនៃការបង្វិលនៃអ័ក្សដ្រាយផងដែរ។ ប្រសិនបើអ័ក្សស្ថិតនៅលើយន្តហោះតែមួយ ប្រអប់លេខ bevel ត្រូវបានប្រើ ប្រសិនបើនៅផ្សេងគ្នា នោះឧបករណ៍បញ្ជូនប្រភេទដង្កូវ ឬភពត្រូវបានប្រើ។
ដើម្បីអនុវត្តចលនាជាមួយនឹងកំឡុងពេលជាក់លាក់មួយ ធ្មេញមួយ (ឬច្រើន) ត្រូវបានទុកនៅលើប្រអប់លេខមួយ។ បន្ទាប់មកអ័ក្សទិន្នផលនឹងផ្លាស់ទីនៅមុំដែលបានផ្តល់ឱ្យតែរាល់បដិវត្តន៍ពេញលេញនៃអ័ក្សដ្រាយ។
ប្រសិនបើអ្នកបើកប្រអប់លេខមួយនៅលើយន្តហោះ នោះអ្នកនឹងទទួលបានប្រអប់លេខ។ គូបែបនេះអាចបំប្លែងចលនាបង្វិលទៅជាចលនាលីនេអ៊ែរ។
ប៉ារ៉ាម៉ែត្រត្រៀមលក្ខណៈ
ដើម្បីឱ្យប្រអប់លេខភ្ជាប់ និងបញ្ជូនចលនាប្រកបដោយប្រសិទ្ធភាព វាចាំបាច់ដែលធ្មេញត្រូវផ្គូផ្គងគ្នាយ៉ាងជាក់លាក់តាមទម្រង់។ ប៉ារ៉ាម៉ែត្រចំបងដែលប្រើក្នុងការគណនាត្រូវបានគ្រប់គ្រង៖
- អង្កត់ផ្ចិតនៃរង្វង់ចាប់ផ្តើម។
- ទីលានភ្ជាប់ពាក្យ គឺជាចំងាយរវាងធ្មេញជាប់គ្នា ដែលកំណត់តាមបន្ទាត់នៃរង្វង់ដំបូង។
- ម៉ូឌុល។ - សមាមាត្រនៃជំហានទៅថេរπ។ Gears ដែលមានម៉ូឌុលស្មើគ្នាតែងតែចូលរួម ដោយមិនគិតពីចំនួនធ្មេញ។ ស្ដង់ដារកំណត់ជួរដែលអាចទទួលយកបាននៃតម្លៃម៉ូឌុល។ ប៉ារ៉ាម៉ែត្រសំខាន់ទាំងអស់នៃប្រអប់លេខត្រូវបានបង្ហាញតាមរយៈម៉ូឌុល។
- កម្ពស់ធ្មេញ។
ប៉ារ៉ាម៉ែត្រសំខាន់ផងដែរគឺកម្ពស់នៃក្បាលនិងមូលដ្ឋាននៃធ្មេញ, អង្កត់ផ្ចិតនៃរង្វង់នៃ protrusions មុំវណ្ឌវង្កនិងផ្សេងទៀត។
គុណសម្បត្តិ
ការបញ្ជូនប្រភេទ Gear-type មានគុណសម្បត្តិជាក់ស្តែងមួយចំនួន។ នេះ៖
- ការបំប្លែងប៉ារ៉ាម៉ែត្រចលនា (ល្បឿននិងកម្លាំងបង្វិលជុំ) ក្នុងជួរធំទូលាយ;
- ការអត់ធ្មត់កំហុសខ្ពស់និងជីវិតសេវាកម្ម;
- បង្រួម;
- ការខាតបង់ទាបនិងប្រសិទ្ធភាពខ្ពស់;
- បន្ទុកអ័ក្សពន្លឺ;
- ស្ថេរភាពនៃសមាមាត្រឧបករណ៍;
- ការថែទាំនិងជួសជុលងាយស្រួល។
គុណវិបត្តិ
យន្តការប្រអប់លេខក៏មានគុណវិបត្តិមួយចំនួនផងដែរ៖
- ការផលិត និងការផ្គុំត្រូវការភាពជាក់លាក់ខ្ពស់ និងការព្យាបាលលើផ្ទៃពិសេស។
- សំឡេងរំខាន និងរំញ័រដែលមិនអាចជៀសវាងបាន ជាពិសេសក្នុងល្បឿនលឿន ឬកម្លាំងខ្ពស់។
- ភាពរឹងនៃរចនាសម្ព័ន្ធនាំឱ្យមានការបែកបាក់នៅពេលចាក់សោររុញច្រាន។
នៅពេលជ្រើសរើសប្រភេទបញ្ជូនអ្នករចនាប្រៀបធៀបគុណសម្បត្តិនិងគុណវិបត្តិសម្រាប់ករណីជាក់លាក់នីមួយៗ។
ឧបករណ៍មេកានិច
ការបញ្ជូនមេកានិចបម្រើដើម្បីបញ្ជូនការបង្វិលពីអ័ក្សដ្រាយទៅដ្រាយមួយពីកន្លែងនៃការបង្កើតថាមពលមេកានិច (ជាធម្មតាម៉ាស៊ីននៃប្រភេទមួយឬមួយផ្សេងទៀត) ទៅកន្លែងនៃការប្រើប្រាស់ឬការបំលែងរបស់វា។
តាមក្បួនម៉ាស៊ីនបង្វិលអ័ក្សរបស់ពួកគេជាមួយនឹងការផ្លាស់ប្តូរកម្រិតល្បឿន និងកម្លាំងបង្វិលជុំ។ អ្នកប្រើប្រាស់ត្រូវការជួរធំទូលាយជាងមុន។
យោងតាមវិធីសាស្រ្តនៃការផ្ទេរថាមពលមេកានិចប្រភេទខាងក្រោមត្រូវបានសម្គាល់ក្នុងចំណោមឧបករណ៍:
- ធ្មេញ;
- វីស;
- អាចបត់បែនបាន។
- កកិត
យន្តការបញ្ជូនប្រអប់លេខ ត្រូវបានបែងចែកជាប្រភេទដូចជា៖
- ស៊ីឡាំង;
- សាជី;
- រូបថតរបស់ Novikov។
ដោយផ្អែកលើសមាមាត្រនៃល្បឿនបង្វិលនៃដ្រាយ និងអ័ក្សជំរុញ ភាពខុសគ្នាមួយត្រូវបានធ្វើឡើងរវាងប្រអប់លេខ (កាត់បន្ថយល្បឿន) និងមេគុណ (បង្កើនល្បឿន)។ ការបញ្ជូនដោយដៃទំនើបសម្រាប់រថយន្តមួយរួមបញ្ចូលគ្នានូវប្រភេទទាំងពីរ ដែលជាទាំងឧបករណ៍កាត់បន្ថយ និងមេគុណ។
មុខងាររបស់ឧបករណ៍មេកានិច
មុខងារចម្បងនៃការបញ្ជូនមេកានិកគឺផ្ទេរថាមពល kinetic ពីប្រភពរបស់វាទៅអ្នកប្រើប្រាស់ តួធ្វើការ។ បន្ថែមពីលើមេ យន្តការបញ្ជូនក៏អនុវត្តមុខងារបន្ថែមផងដែរ៖
- ការផ្លាស់ប្តូរល្បឿននិងកម្លាំងបង្វិលជុំ។ នៅបរិមាណថេរនៃចលនាការផ្លាស់ប្តូរបរិមាណទាំងនេះគឺសមាមាត្រច្រាស។ សម្រាប់ការផ្លាស់ប្តូរជំហាន គូប្រអប់លេខដែលអាចជំនួសបានត្រូវបានប្រើប្រាស់ សម្រាប់ការផ្លាស់ប្តូរដោយរលូន ខ្សែក្រវាត់ ឬរង្វិលបង្វិលគឺសមរម្យ។
- ការផ្លាស់ប្តូរទិសដៅនៃការបង្វិល។ រួមបញ្ចូលទាំងការបញ្ច្រាសធម្មតា និងការផ្លាស់ប្តូរទិសដៅនៃអ័ក្សបង្វិលដោយប្រើយន្តការរាងសាជី ភព ឬ cardan ។
- ការបំប្លែងប្រភេទចលនា។ បង្វិលទៅជាលីនេអ៊ែរ បន្តទៅជារង្វិល។
- ការចែកចាយកម្លាំងបង្វិលជុំរវាងអ្នកប្រើប្រាស់ជាច្រើន។
ការបញ្ជូនមេកានិចក៏អនុវត្តមុខងារជំនួយផ្សេងទៀត។
វិស្វករមេកានិចបានអនុម័តការចាត់ថ្នាក់ជាច្រើនអាស្រ័យលើកត្តាចាត់ថ្នាក់។
ដោយផ្អែកលើគោលការណ៍នៃប្រតិបត្តិការប្រភេទនៃការបញ្ជូនមេកានិចខាងក្រោមត្រូវបានសម្គាល់:
- ការចូលរួម;
- រំកិលកកិត;
- តំណភ្ជាប់ដែលអាចបត់បែនបាន។
យោងទៅតាមទិសដៅនៃការផ្លាស់ប្តូរល្បឿនប្រអប់លេខ (ការថយចុះ) និងមេគុណ (ការកើនឡើង) ត្រូវបានសម្គាល់។ ពួកវានីមួយៗផ្លាស់ប្តូរកម្លាំងបង្វិលតាម (ក្នុងទិសដៅផ្ទុយ) ។
យោងតាមចំនួនអ្នកប្រើប្រាស់ថាមពលបង្វិលបញ្ជូន ទម្រង់អាចជា៖
- ខ្សែស្រឡាយតែមួយ;
- ពហុខ្សែស្រឡាយ
យោងតាមចំនួននៃដំណាក់កាលផ្លាស់ប្តូរ - ដំណាក់កាលតែមួយនិងពហុដំណាក់កាល។
ដោយផ្អែកលើការផ្លាស់ប្តូរប្រភេទនៃចលនា ប្រភេទនៃការបញ្ជូនមេកានិចខាងក្រោមត្រូវបានសម្គាល់៖
- បង្វិល - បកប្រែ។ ដង្កូវ rack និងវីស។
- ការបង្វិល - បង្វិល។ គូ Lever ។
- ការបកប្រែ - បង្វិល។ Cranks ត្រូវបានគេប្រើយ៉ាងទូលំទូលាយនៅក្នុងម៉ាស៊ីនចំហេះខាងក្នុង និងម៉ាស៊ីនចំហុយ។
ដើម្បីធានាបាននូវចលនាតាមបណ្តោយគន្លងដែលបានបញ្ជាក់ស្មុគស្មាញ ប្រព័ន្ធនៃដងថ្លឹង កាំ និងសន្ទះបិទបើកត្រូវបានប្រើប្រាស់។
សូចនាករសំខាន់ៗសម្រាប់ជ្រើសរើសឧបករណ៍មេកានិច
ការជ្រើសរើសប្រភេទនៃការបញ្ជូនគឺជាកិច្ចការរចនាដ៏ស្មុគស្មាញ។ វាចាំបាច់ក្នុងការជ្រើសរើសប្រភេទ និងរចនាយន្តការដែលបំពេញបានយ៉ាងពេញលេញនូវតម្រូវការបច្ចេកទេសដែលបានបង្កើតឡើងសម្រាប់អង្គភាពដែលបានផ្តល់ឱ្យ។
នៅពេលជ្រើសរើសអ្នករចនាប្រៀបធៀបកត្តាសំខាន់ៗដូចខាងក្រោមៈ
- បទពិសោធន៍នៃការរចនាស្រដៀងគ្នាពីមុន;
- កម្លាំងនិងកម្លាំងបង្វិលជុំនៅលើអ័ក្ស;
- ចំនួននៃបដិវត្តន៍នៅការបញ្ចូលនិងទិន្នផល;
- ប្រសិទ្ធភាពដែលត្រូវការ;
- ទំងន់និងលក្ខណៈនៃទំហំ;
- ភាពអាចរកបាននៃការកែតម្រូវ;
- ធនធានប្រតិបត្តិការដែលបានគ្រោងទុក;
- ថ្លៃដើមផលិតកម្ម;
- ថ្លៃសេវា។
សម្រាប់ថាមពលបញ្ជូនខ្ពស់ ប្រភេទប្រអប់លេខច្រើនត្រូវបានជ្រើសរើសជាធម្មតា។ ប្រសិនបើអ្នកត្រូវការលៃតម្រូវល្បឿនលើជួរធំទូលាយ វាជាការល្អក្នុងការជ្រើសរើសឧបករណ៍បំរែបំរួល V-belt ។ ការសម្រេចចិត្តចុងក្រោយនៅតែមានជាមួយអ្នករចនា។
ឧបករណ៍ Helical
យន្តការនៃប្រភេទនេះត្រូវបានធ្វើឡើងដោយឧបករណ៍ខាងក្នុងឬខាងក្រៅ។ ប្រសិនបើធ្មេញស្ថិតនៅមុំមួយទៅនឹងអ័ក្សបណ្តោយ នោះឧបករណ៍ត្រូវបានគេហៅថា helical ។ នៅពេលដែលមុំទំនោរនៃធ្មេញកើនឡើង កម្លាំងរបស់គូនឹងកើនឡើង។ Helical gearing ក៏ត្រូវបានកំណត់លក្ខណៈដោយភាពធន់នឹងការពាក់កាន់តែប្រសើរ ដំណើរការរលូន និងកម្រិតសំលេងរំខាន និងរំញ័រទាប។
ប្រសិនបើវាចាំបាច់ដើម្បីផ្លាស់ប្តូរទិសដៅនៃការបង្វិល ហើយអ័ក្សអ័ក្សស្ថិតនៅក្នុងយន្តហោះដូចគ្នានោះ ប្រភេទនៃការបញ្ជូន bevel ត្រូវបានប្រើ។ មុំផ្លាស់ប្តូរទូទៅបំផុតគឺ 90 °។
យន្តការប្រភេទនេះមានភាពស្មុគ្រស្មាញជាងមុនក្នុងការផលិត និងដំឡើង ហើយដូចជា helical ទាមទារការពង្រឹងរចនាសម្ព័ន្ធទ្រទ្រង់។
យន្តការរាងសាជីអាចបញ្ជូនថាមពលរហូតដល់ 80% បើប្រៀបធៀបទៅនឹងយន្តការស៊ីឡាំង។
ការបញ្ជូនឧបករណ៍ Rack និងខ្សែក្រវ៉ាត់
ស្តង់ដារ
ប៉ារ៉ាម៉ែត្រចំបងនៃប្រភេទផ្សេងៗនៃប្រអប់លេខត្រូវបានស្តង់ដារដោយ GOSTs ពាក់ព័ន្ធ៖
- ធ្មេញស៊ីឡាំង: 16531-83 ។
- ពពួក Worm 2144-76 ។
- បញ្ចូល 19274-73 ។
ទាញយក GOST 16531-83
យន្តការទូទៅបំផុតសម្រាប់ការបំប្លែងចលនារង្វិលទៅជាចលនាលីនេអ៊ែរគឺអ្នកដែលធ្លាប់ស្គាល់យើងពីរូបភព។ 1 crank និងយោងទៅតាមរូបភព។ 7, ឃ - rack និង pinion ក៏ដូចជាវីស, eccentric, rocker, ratchet និងយន្តការផ្សេងទៀត។
យន្តការវីស
យន្តការវីសត្រូវបានគេប្រើយ៉ាងទូលំទូលាយនៅក្នុងម៉ាស៊ីនជាច្រើនប្រភេទ ដើម្បីបំប្លែងចលនាបង្វិលទៅជាចលនាបកប្រែ ហើយផ្ទុយទៅវិញ ចលនាបកប្រែទៅជាចលនាបង្វិល។ ជាពិសេសជាញឹកញាប់ យន្តការវីសប្រើក្នុងឧបករណ៍ម៉ាស៊ីន ដើម្បីអនុវត្តជំនួយលីនេអ៊ែរ (ចំណី) ឬការដំឡើង (វិធីសាស្រ្ត ដកថយ ការគៀប) ចលនានៃគ្រឿងផ្គុំដូចជាតុ ជំនួយ រទេះ ក្បាល spindle ក្បាលជាដើម។
វីសដែលប្រើក្នុងយន្តការទាំងនេះត្រូវបានគេហៅថាវីសដែលកំពុងដំណើរការ។ ជាញឹកញាប់ផងដែរ។ យន្តការវីសបម្រើសម្រាប់ការលើកបន្ទុក ឬជាទូទៅសម្រាប់ការបញ្ជូនកម្លាំង។ ឧទាហរណ៍នៃកម្មវិធីបែបនេះ យន្តការវីសគឺត្រូវប្រើវានៅក្នុង jacks, screw ties, etc. ក្នុងករណីនេះ វីសនឹងត្រូវបានគេហៅថា cargo screws។ វីសផ្ទុកជាធម្មតាដំណើរការក្នុងល្បឿនទាប ប៉ុន្តែមានកម្លាំងខ្លាំងជាងបើធៀបនឹងវីសនាំមុខ។
ព័ត៌មានលម្អិតសំខាន់ៗ យន្តការវីសគឺជាវីស និងគ្រាប់។
ជាធម្មតានៅក្នុង យន្តការវីស(screw-nut transmissions) ចលនាត្រូវបានបញ្ជូនពីវីសទៅយចន ពោលគឺ ចលនាបង្វិលនៃវីសត្រូវបានបំប្លែងទៅជាចលនាបកប្រែនៃយចន ឧទាហរណ៍ យន្តការនៃចលនាឆ្លងកាត់នៃការគាំទ្ររបស់ម៉ាស៊ីនក្រឡឹង។ មានការរចនាដែលចលនាត្រូវបានបញ្ជូនពីយចនទៅវីស ហើយវីសស្ពឺដែលការបង្វិលវីសត្រូវបានបំប្លែងទៅជាចលនាបកប្រែនៃវីសដូចគ្នា ជាមួយនឹងគ្រាប់ថេរដែលមិនមានចលនា។ ឧទាហរណ៍នៃយន្តការបែបនេះ ឧបករណ៍ helicalផ្នែកខាងលើនៃតារាង (រូបភាពទី 9, ក) នៃម៉ាស៊ីនកិន។ នៅពេលដែលចំណុចទាញ 6 បង្វិលវីស 1 នៅក្នុងយចន 2, ធានាដោយវីស 3 នៅក្នុងស្លាយតារាង 4, 5, វីស 1 ចាប់ផ្តើមឆ្ពោះទៅមុខ។ តារាងទី 5 ផ្លាស់ទីតាមមគ្គុទ្ទេសក៍ស្លាយជាមួយវា។
យន្តការអេកសេនិច និងកាមេរ៉ា
គ្រោងការណ៍ យន្តការ eccentricបង្ហាញក្នុងរូប។ ៩, ខ. eccentric គឺជាឌីសរាងមូល ដែលអ័ក្សត្រូវបានអុហ្វសិតទាក់ទងទៅនឹងអ័ក្សនៃការបង្វិលនៃអ័ក្សដែលផ្ទុកថាស។ នៅពេលដែល shaft 2 បង្វិល, eccentric 1 ធ្វើសកម្មភាពនៅលើ roller 3, ផ្លាស់ទីវានិងដំបងដែលពាក់ព័ន្ធ 4 ឡើងលើ។ វិលត្រលប់មកវិញដោយនិទាឃរដូវ 5. ដូច្នេះចលនារង្វិលនៃអ័ក្ស 2 ត្រូវបានបំប្លែង យន្តការ eccentricចូលទៅក្នុងចលនាទៅមុខនៃដំបង 4.

យន្តការខេមប្រើយ៉ាងទូលំទូលាយនៅក្នុងម៉ាស៊ីនស្វ័យប្រវត្តិ និងម៉ាស៊ីនផ្សេងទៀត ដើម្បីអនុវត្តវដ្តការងារដោយស្វ័យប្រវត្តិ។ យន្តការទាំងនេះអាចនៅជាមួយថាសស៊ីឡាំង និងម៉ាស៊ីនមេកានិក។ បង្ហាញក្នុងរូប។ 9, យន្តការមាន cam 1 ជាមួយ groove 2 នៃរាងស្មុគ្រស្មាញនៅខាងចុង ដែលក្នុងនោះ roller 3 ត្រូវបានដាក់ភ្ជាប់ជាមួយ slider 4 ដោយ rod 5. ជាលទ្ធផលនៃការបង្វិល cam 1 (នៅក្នុងផ្នែកផ្សេងគ្នារបស់វា) គ្រាប់រំកិល 4 ទទួលបានល្បឿនខុសៗគ្នានៃចលនា rectilinear reciprocating ។
យន្តការរ៉ក
នៅក្នុងរូបភព។ 9, ឃ បង្ហាញដ្យាក្រាម យន្តការរ៉ុកត្រូវបានគេប្រើយ៉ាងទូលំទូលាយឧទាហរណ៍នៅក្នុងម៉ាស៊ីនឆ្លងកាត់ និងរន្ធដោត។ ជាមួយនឹងគ្រាប់រំកិល 1 ដែលផ្នែកជំនួយជាមួយឧបករណ៍កាត់ត្រូវបានភ្ជាប់ ផ្នែកទី 4 យោលទៅឆ្វេង និងស្តាំ ហៅថា rocker ត្រូវបានភ្ជាប់ដោយហ៊ីងដោយមធ្យោបាយនៃក្រវិល 2 ។ នៅផ្នែកខាងក្រោម រ៉កទ័រត្រូវបានភ្ជាប់ដោយហ៊ីង 6 ហើយជាមួយនឹងចុងទាបរបស់វា វាបង្វិលអំពីអ័ក្សនេះក្នុងអំឡុងពេលប្តូរ។
ការរញ្ជួយរបស់ rocker កើតឡើងជាលទ្ធផលនៃចលនាបកប្រែ និងច្រាសមកវិញនៅក្នុងចង្អូររបស់វានៃផ្នែកទី 5 ដែលហៅថា rocker stone និងទទួលបានចលនាពី gear 3 ដែលវាត្រូវបានភ្ជាប់។ ទៅកាន់ប្រអប់លេខ 3 ដែលហៅថាឧបករណ៍រ៉ក ការបង្វិលត្រូវបានបញ្ជូនដោយកង់ដែលដាក់នៅលើអ័ក្សដ្រាយ។ ល្បឿននៃការបង្វិលកង់រ៉កត្រូវបានគ្រប់គ្រងដោយប្រអប់លេខដែលភ្ជាប់ទៅនឹងម៉ូទ័រអេឡិចត្រិច។
ប្រវែងដាច់សរសៃឈាមខួរក្បាលរបស់គ្រាប់រំកិលអាស្រ័យលើប្រភេទថ្មដែលដំឡើងនៅលើឧបករណ៍រ៉ុក។ កាន់តែឆ្ងាយ ថ្មរ៉ុកគឺមកពីចំណុចកណ្តាលនៃប្រអប់លេខ រង្វង់កាន់តែធំដែលវាពិពណ៌នានៅពេលប្រអប់លេខបង្វិល ហើយជាលទ្ធផល មុំយោលរបស់រ៉កកាន់តែធំ និងរយៈពេលវែងរបស់គ្រាប់រំកិល។ ហើយផ្ទុយមកវិញ កាន់តែខិតទៅជិតកណ្តាលនៃកង់ ដែលថ្មរ៉ុកត្រូវបានដំឡើង ចលនាដែលបានរាយបញ្ជីគឺតិចជាង។
កន្ត្រក
កន្ត្រកអនុញ្ញាតឱ្យអ្នកផ្លាស់ប្តូរបរិមាណនៃចលនាតាមកាលកំណត់នៃផ្នែកធ្វើការរបស់ម៉ាស៊ីននៅលើជួរដ៏ធំទូលាយមួយ។ ប្រភេទ និងកម្មវិធីនៃយន្តការ ratchet គឺខុសគ្នា។

យន្តការ Ratchet(រូបភព 10) មានតំណភ្ជាប់សំខាន់ៗចំនួន 4: rack 1, ratchet (gear) 4, lever 2 និង part 3 with a protrusion, which is called a pawl. ចង្កឹះដែលមានធ្មេញបត់ក្នុងទិសមួយត្រូវបានដំឡើងនៅលើអ័ក្សជំរុញនៃយន្តការ។ នៅលើអ័ក្សដូចគ្នាជាមួយនឹងចង្កឹះលេខ 2 ត្រូវបាន hinged, បង្វិល (swinging) នៅក្រោមសកម្មភាពរបស់ drive rod 6. pawl មួយក៏ត្រូវបាន hinged នៅលើ lever, protrusion ដែលមានរាងដែលត្រូវគ្នាទៅនឹងបែហោងធ្មែញរវាងធ្មេញ។ នៃ ratchet នេះ។
កំឡុងពេលធ្វើការ យន្តការ ratchetដង្កៀប 2 ចាប់ផ្តើមផ្លាស់ទី។ នៅពេលដែលវាផ្លាស់ទីទៅខាងស្តាំ ក្រញាំរអិលដោយសេរីតាមផ្នែកមូលនៃធ្មេញ ratchet បន្ទាប់មកនៅក្រោមឥទ្ធិពលនៃទំនាញរបស់វា ឬនិទាឃរដូវពិសេស វាលោតចូលទៅក្នុងបែហោងធ្មែញ ហើយសម្រាកប្រឆាំងនឹងបន្ទាប់។ ធ្មេញរុញវាទៅមុខ។ ជាលទ្ធផលនៃការនេះ ratchet និងជាមួយវា shaft ជំរុញ, បង្វិល។ ការបង្វិលបញ្ច្រាសនៃ ratchet ជាមួយ shaft ជំរុញនៅពេលដែល lever ជាមួយ pawl 3 ទំនេរត្រូវបានរារាំងដោយ pawl ចាក់សោ 5, hinged នៅលើអ័ក្សថេរនិងចុចប្រឆាំងនឹង ratchet ដោយនិទាឃរដូវមួយ។
យន្តការដែលបានពិពណ៌នាបំប្លែងចលនារញ្ជួយនៃដងថ្លឹងទៅជាចលនារង្វិលជាប់គ្នានៃអ័ក្សដែលបានជំរុញ។