Telesni impulz iz moči. Zakon o ohranjanju impulza. Od kod je prišel izraz "impulz"?
Telesni impulz
Impulz telesa je količina, ki je enaka produktu mase telesa na njegovo hitrost.
Ne smemo pozabiti, da govorimo o telesu, ki ga lahko predstavimo kot materialno točko. Hitrost telesa ($ p $) se imenuje tudi količina gibanja. Koncept zagona je v fiziko uvedel René Descartes (1596-1650). Izraz "impulz" se je pojavil pozneje (impulsus v latinščini pomeni "potiskanje"). Impulz je vektorska količina (kot hitrost) in je izražena s formulo:
$ p↖ (→) = mυ↖ (→) $
Smer impulznega vektorja vedno sovpada s smerjo hitrosti.
Enota impulza v SI je impulz telesa z maso $ 1 $ kg, ki se giblje s hitrostjo $ 1 $ m / s, zato je enota impulza $ 1 $ kg $ · $ m / s.
Če na telo (materialno točko) v časovnem intervalu $ ∆t $ deluje konstantna sila, bo tudi pospešek konstanten:
$ a↖ (→) = ((υ_2) ↖ (→) - (υ_1) ↖ (→)) / (∆t) $
kjer sta $ (υ_1) ↖ (→) $ in $ (υ_2) ↖ (→) $ začetna in končna hitrost telesa. Če to vrednost nadomestimo z izrazom Newtonovega drugega zakona, dobimo:
$ (m ((υ_2) ↖ (→) - (υ_1) ↖ (→))) / (∆t) = F↖ (→) $
Če odpremo oklepaje in uporabimo izraz za zagon telesa, imamo:
$ (p_2) ↖ (→) - (p_1) ↖ (→) = F↖ (→) ∆t $
Tukaj je $ (p_2) ↖ (→) - (p_1) ↖ (→) = ∆p↖ (→) $ sprememba zagona v času $ ∆t $. Potem bo prejšnja enačba dobila obliko:
$ ∆p↖ (→) = F↖ (→) ∆t $
Izraz $ ∆p↖ (→) = F↖ (→) ∆t $ je matematična predstavitev Newtonovega drugega zakona.
Produkt sile v času njenega delovanja se imenuje impulz moči... Zato sprememba gibalne količine točke je enaka spremembi gibalne količine sile, ki nanjo deluje.
Izraz $ ∆p↖ (→) = F↖ (→) ∆t $ se imenuje enačba gibanja telesa... Treba je opozoriti, da je eno in isto dejanje – spremembo zagona točke – mogoče doseči z majhno silo v daljšem časovnem obdobju in z veliko silo v kratkem času.
Impulz tel. Zakon o spremembi impulza
Zagon (moment) mehanskega sistema je vektor, ki je enak vsoti impulzov vseh materialnih točk tega sistema:
$ (p_ (sistem)) ↖ (→) = (p_1) ↖ (→) + (p_2) ↖ (→) + ... $
Zakoni spreminjanja in ohranjanja zagona so posledica Newtonovega drugega in tretjega zakona.
Razmislite o sistemu, sestavljenem iz dveh teles. Sili ($ F_ (12) $ in $ F_ (21) $ na sliki, s katerimi telesa sistema medsebojno delujejo, se imenujejo notranje).
Naj na sistem poleg notranjih sil delujeta še zunanji sili $ (F_1) ↖ (→) $ in $ (F_2) ↖ (→) $. Za vsako telo lahko zapišemo enačbo $ ∆p↖ (→) = F↖ (→) ∆t $. Če dodamo levo in desno stran teh enačb, dobimo:
$ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_ (12)) ↖ (→) + (F_ (21)) ↖ (→) + (F_1) ↖ (→) + (F_2) ↖ (→)) ∆t $
Po tretjem Newtonovem zakonu je $ (F_ (12)) ↖ (→) = - (F_ (21)) ↖ (→) $.
zato
$ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_1) ↖ (→) + (F_2) ↖ (→)) ∆t $
Na levi strani je geometrijska vsota sprememb impulzov vseh teles sistema, enaka spremembi gibalne količine samega sistema - $ (∆p_ (sistem)) ↖ (→) $. Če upoštevamo to Enakost $ (∆p_1) ↖ (→) + (∆p_2) ↖ (→) = ((F_1) ↖ (→) + (F_2) ↖ (→)) ∆t $ lahko zapišemo:
$ (∆p_ (sistem)) ↖ (→) = F↖ (→) ∆t $
kjer je $ F↖ (→) $ vsota vseh zunanjih sil, ki delujejo na telo. Dobljeni rezultat pomeni, da lahko zagon sistema spreminjajo samo zunanje sile, sprememba gibalne količine sistema pa je usmerjena na enak način kot skupna zunanja sila. To je bistvo zakona o spremembi gibalne količine mehanskega sistema.
Notranje sile ne morejo spremeniti celotnega impulza sistema. Spremenijo le impulze posameznih teles sistema.
Zakon o ohranjanju impulza
Zakon ohranjanja gibalne količine izhaja iz enačbe $ (∆p_ (sist)) ↖ (→) = F↖ (→) ∆t $. Če na sistem ne delujejo nobene zunanje sile, potem desna stran enačbe $ (∆p_ (sistem)) ↖ (→) = F↖ (→) ∆t $ izgine, kar pomeni, da skupni impulz sistema ostane nespremenjen:
$ (∆p_ (sistem)) ↖ (→) = m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = const $
Sistem, na katerega ne delujejo nobene zunanje sile ali so nastale zunanje sile enake nič, se imenuje zaprto.
Zakon o ohranjanju zagona pravi:
Celoten impulz zaprtega sistema teles ostane konstanten za kakršne koli interakcije teles sistema med seboj.
Dobljeni rezultat velja za sistem, ki vsebuje poljubno število teles. Če vsota zunanjih sil ni enaka nič, vendar je vsota njihovih projekcij na neko smer enaka nič, se projekcija gibalne količine sistema na to smer ne spremeni. Tako na primer sistema teles na površini Zemlje ni mogoče šteti za zaprtega zaradi sile gravitacije, ki deluje na vsa telesa, vendar lahko vsota projekcij impulzov na vodoravno smer ostane nespremenjena (če ni trenja), saj v tej smeri ne deluje sila teže.
Reaktivni pogon
Poglejmo primere, ki potrjujejo veljavnost zakona o ohranitvi gibalne količine.
Vzemite otroški gumijasti balon, ga napihnite in spustite. Videli bomo, da ko ga bo zrak začel zapuščati v eno smer, bo žogica sama letela v drugo. Gibanje žoge je primer reaktivnega pogona. Pojasnjuje ga zakon o ohranjanju gibalne količine: skupna gibalna količina sistema "kroglica plus zrak v njej" pred iztokom zraka je enaka nič; med gibanjem mora ostati enak nič; zato se krogla giblje v smeri, ki je nasprotna smeri izteka curka, in to s takšno hitrostjo, da je njena gibalna količina po velikosti enaka gibalnemu gibanju zračnega curka.
Reaktivno gibanje se imenuje gibanje telesa, ki nastane, ko se od njega s poljubno hitrostjo loči kakšen njegov del. Zaradi zakona o ohranitvi gibalne količine je smer gibanja telesa nasprotna smeri gibanja ločenega dela.
Letenje z raketami temelji na principu reaktivnega pogona. Sodobna vesoljska raketa je zelo zapleteno letalo. Masa rakete je sestavljena iz mase delovnega medija (to je žarečih plinov, ki nastanejo kot posledica zgorevanja goriva in se oddajajo v obliki curka) in končnega ali, kot pravijo, , "suha" masa rakete, ki ostane po izmetu delovnega medija iz rakete.
Ko se reaktivni plinski curek izvrže iz rakete z veliko hitrostjo, raketa sama hiti v nasprotni smeri. Po zakonu o ohranitvi gibalne količine mora biti zagon $ m_ (p) υ_p $, ki ga pridobi raketa, enak gibalnemu gibanju $ m_ (plin) υ_ (plin) $ izvrženih plinov:
$ m_ (p) υ_p = m_ (plin) υ_ (plin) $
Iz tega sledi, da je hitrost rakete
$ υ_p = ((m_ (plin)) / (m_p)) υ_ (plin) $
Iz te formule je razvidno, da je hitrost rakete večja, čim večja je hitrost izpuščenih plinov in razmerje med maso delovnega telesa (tj. maso goriva) in končnim ("suhim"). ") masa rakete.
Formula $ υ_p = ((m_ (plin)) / (m_p)) υ_ (plin) $ je približna. Ne upošteva, da z zgorevanjem goriva masa rakete med letom postaja vse manjša. Natančno formulo za hitrost rakete je leta 1897 pridobil K.E. Tsiolkovsky in nosi njegovo ime.
Delo na silo
Izraz "delo" je leta 1826 v fiziko uvedel francoski znanstvenik J. Poncelet. Če se v vsakdanjem življenju samo človeško delo imenuje delo, potem je v fiziki in zlasti v mehaniki splošno sprejeto, da se delo opravlja na silo. Fizična količina dela je običajno označena s črko $ A $.
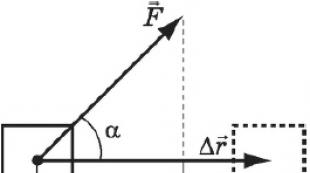
Delo na silo Je merilo delovanja sile, odvisno od njenega modula in smeri, pa tudi od gibanja točke uporabe sile. Za konstantno silo in linearno gibanje je delo določeno z enakostjo:
$ A = F | ∆r↖ (→) | cosα $
kjer je $ F $ sila, ki deluje na telo, $ ∆r↖ (→) $ je premik, $ α $ je kot med silo in premikom.

Delo sile je enako zmnožku modulov sile in premika in kosinusa kota med njima, torej skalarnemu produktu vektorjev $ F↖ (→) $ in $ ∆r↖ (→) $.
Delo je skalarna količina. Če je $ α 0 $, in če $ 90 °
Ko na telo deluje več sil, je skupno delo (vsota dela vseh sil) enako delu nastale sile.
Delovna enota v SI je joule(1 $ J). $ 1 $ J je delo, ki ga opravi sila $ 1 $ N na poti do $ 1 $ m v smeri delovanja te sile. Ta enota je poimenovana po angleškem znanstveniku J. Joulu (1818-1889): $ 1 $ J = $ 1 $ N $ · $ m. Pogosto se uporabljajo tudi kilodžuli in milijouli: $ 1 $ kJ $ = 1.000 $ J, $ 1 $ mJ $ = 0,001 $ J.
Delo gravitacije
Razmislite o telesu, ki drsi po nagnjeni ravnini z naklonskim kotom $ α $ in višino $ H $.

Izrazimo $ ∆x $ z $ H $ in $ α $:
$ ∆x = (H) / (sinα) $
Ob upoštevanju, da sila teže $ F_t = mg $ tvori kot ($ 90 ° - α $) s smerjo gibanja, z uporabo formule $ ∆x = (H) / (sin) α $, dobimo izraz za delo sile težnosti $ A_g $:
$ A_g = mg · cos (90 ° -α) · (H) / (sinα) = mgH $
Iz te formule je razvidno, da je delo težnosti odvisno od višine in ni odvisno od kota nagiba ravnine.
Sledi, da:
- delo gravitacije ni odvisno od oblike poti, po kateri se telo giblje, temveč le od začetnega in končnega položaja telesa;
- ko se telo giblje po zaprti poti, je delo gravitacije nič, to pomeni, da je gravitacija konzervativna sila (sile, ki imajo to lastnost, se imenujejo konzervativne).
Reakcijske sile delujejo, je enaka nič, saj je reakcijska sila ($ N $) usmerjena pravokotno na premik $ ∆x $.
Delovanje sile trenja
Sila trenja je usmerjena nasproti premika $ ∆x $ in tvori z njo kot $ 180 ° $, zato je delo sile trenja negativno:
$ A_ (tr) = F_ (tr) ∆x cos180 ° = -F_ (tr) ∆x $
Ker je $ F_ (tr) = μN, N = mgcosα, ∆x = l = (H) / (sinα), $ potem
$ A_ (tr) = μmgHctgα $
Delovanje elastične sile
Naj na neraztegnjeno vzmet dolžine $ l_0 $ deluje zunanja sila $ F↖ (→) $ in jo raztegne za $ ∆l_0 = x_0 $. V položaju $ x = x_0F_ (nadzor) = kx_0 $. Po prenehanju delovanja sile $ F↖ (→) $ v točki $ х_0 $ se vzmet stisne pod delovanjem sile $ F_ (nadzor) $.

Določimo delo elastične sile, ko se koordinata desnega konca vzmeti spremeni iz $ x_0 $ v $ x $. Ker se elastična sila v tem odseku spreminja linearno, lahko v Hookeovem zakonu uporabite njeno povprečno vrednost v tem razdelku:
$ F_ (ctrl.) = (Kx_0 + kx) / (2) = (k) / (2) (x_0 + x) $
Potem je delo (ob upoštevanju, da smeri $ (F_ (prim. primerjaj)) ↖ (→) $ in $ (∆x) ↖ (→) $ sovpadata) enako:
$ A_ (nadzor) = (k) / (2) (x_0 + x) (x_0-x) = (kx_0 ^ 2) / (2) - (kx ^ 2) / (2) $
Lahko se pokaže, da oblika zadnje formule ni odvisna od kota med $ (F_ (prim. primerjaj)) ↖ (→) $ in $ (∆x) ↖ (→) $. Delo elastičnih sil je odvisno le od deformacij vzmeti v začetnem in končnem stanju.
Tako je elastična sila, tako kot gravitacija, konzervativna sila.
Moč sile
Moč je fizična količina, merjena z razmerjem med delom in časom, v katerem je proizvedena.
Z drugimi besedami, moč kaže, koliko dela je opravljenega na enoto časa (v SI - za 1 $ s).
Moč se določi s formulo:
kjer je $ N $ moč, $ A $ je delo, opravljeno v času $ ∆t $.
Če v formulo $ N = (A) / (∆t) $ namesto dela $ A $ nadomestimo njegov izraz $ A = F | (∆r) ↖ (→) | cosα $, dobimo:
$ N = (F | (∆r) ↖ (→) | cosα) / (∆t) = Fυcosα $
Moč je enaka produktu modulov vektorjev sile in hitrosti s kosinusom kota med tema vektorjema.
Moč SI se meri v vatih (W). En vat ($ 1 $ W) je taka moč, pri kateri se opravi 1 $ J delo za $ 1 $ s: $ 1 $ W $ = 1 $ J / s.
Ta enota je poimenovana po angleškem izumitelju J. Wattu (Watt), ki je zgradil prvi parni stroj. J. Watt (1736-1819) je sam uporabil drugo enoto moči - konjske moči (hp), ki jo je uvedel, da bi lahko primerjal zmogljivost parnega stroja in konja: 1 $ KM. $ = 735,5 $ W.
V tehnologiji se pogosto uporabljajo večje enote moči - kilovati in megavati: 1 $ kW $ = 1000 $ W, 1 $ MW $ = 1.000.000 $ W.
Kinetična energija. Zakon spremembe kinetične energije
Če lahko telo ali več medsebojno delujočih teles (sistem teles) opravlja delo, potem pravijo, da imajo energijo.
Beseda "energija" (iz grščine energia - delovanje, dejavnost) se pogosto uporablja v vsakdanjem življenju. Tako se na primer ljudje, ki lahko hitro opravijo, imenujejo energični, imajo veliko energije.
Energija, ki jo ima telo zaradi gibanja, se imenuje kinetična energija.
Tako kot v primeru definicije energije na splošno lahko tudi za kinetično energijo rečemo, da je kinetična energija sposobnost gibajočega se telesa, da opravlja delo.
Najdimo kinetično energijo telesa z maso $ m $, ki se giblje s hitrostjo $ υ $. Ker je kinetična energija energija zaradi gibanja, je zanjo ničelno stanje stanje, v katerem telo miruje. Ko najdemo delo, potrebno za prenos določene hitrosti na telo, bomo našli njegovo kinetično energijo.
Za to izračunamo delo na odseku premika $ ∆r↖ (→) $, ko se smeri vektorjev sil $ F↖ (→) $ in premik $ ∆r↖ (→) $ ujemata. V tem primeru je delo enako
kjer je $ ∆x = ∆r $

Za gibanje točke s pospeškom $ α = const $ ima izraz za gibanje obliko:
$ ∆x = υ_1t + (pri ^ 2) / (2), $
kjer je $ υ_1 $ začetna hitrost.
Če v enačbo $ A = F ∆x $ nadomestimo izraz za $ ∆x $ iz $ ∆x = υ_1t + (pri ^ 2) / (2) $ in uporabimo Newtonov drugi zakon $ F = ma $, dobimo:
$ A = ma (υ_1t + (pri ^ 2) / (2)) = (mat) / (2) (2υ_1 + at) $
Izražanje pospeška v obliki začetne $ υ_1 $ in končne $ υ_2 $ hitrosti $ a = (υ_2-υ_1) / (t) $ in zamenjavo v $ A = ma (υ_1t + (pri ^ 2) / (2)) = (mat) / (2) (2υ_1 + at) $ imamo:
$ A = (m (υ_2-υ_1)) / (2) (2υ_1 + υ_2-υ_1) $
$ A = (mυ_2 ^ 2) / (2) - (mυ_1 ^ 2) / (2) $
Zdaj, ko začetno hitrost enačimo z nič: $ υ_1 = 0 $, dobimo izraz za kinetična energija:
$ E_K = (mυ) / (2) = (p ^ 2) / (2m) $
Tako ima gibajoče se telo kinetično energijo. Ta energija je enaka delu, ki ga je treba opraviti, da povečamo hitrost telesa od nič do vrednosti $ υ $.
Iz $ E_K = (mυ) / (2) = (p ^ 2) / (2m) $ sledi, da je delo sile za premikanje telesa iz enega položaja v drugega enako spremembi kinetične energije:
$ A = E_ (K_2) -E_ (K_1) = ∆E_K $
Enakost $ A = E_ (K_2) -E_ (K_1) = ∆E_K $ izraža izrek o spremembi kinetične energije.
Sprememba kinetične energije telesa(materialna točka) za določeno časovno obdobje je enako delu, ki ga v tem času opravi sila, ki deluje na telo.
Potencialna energija
Potencialna energija je energija, ki jo določa medsebojna razporeditev medsebojno delujočih teles ali delov istega telesa.
Ker je energija opredeljena kot sposobnost telesa za delo, je potencialna energija seveda opredeljena kot delo sile, ki je odvisno samo od relativnega položaja teles. To je delo gravitacije $ A = mgh_1-mgh_2 = mgH $ in delo elastične sile:
$ A = (kx_0 ^ 2) / (2) - (kx ^ 2) / (2) $
Potencialna energija telesa, v interakciji z Zemljo, se imenuje količina, ki je enaka zmnožku mase $ m $ tega telesa s pospeškom težnosti $ g $ in višino $ h $ telesa nad površino Zemlje:
Potencialna energija elastično deformiranega telesa je vrednost, enaka polovici produkta koeficienta elastičnosti (togosti) $ k $ telesa in kvadrata deformacije $ ∆l $:
$ E_p = (1) / (2) k∆l ^ 2 $
Delo konzervativnih sil (teža in elastičnost), ob upoštevanju $ E_p = mgh $ in $ E_p = (1) / (2) k∆l ^ 2 $, je izraženo na naslednji način:
$ A = E_ (p_1) -E_ (p_2) = - (E_ (p_2) -E_ (p_1)) = - ∆E_p $
Ta formula vam omogoča, da podate splošno definicijo potencialne energije.
Potencialna energija sistema je količina, ki je odvisna od položaja teles, katere sprememba je pri prehodu sistema iz začetnega v končno stanje enaka delu notranjih konservativnih sil sistema, vzetih z nasprotno znamenje.
Znak minus na desni strani enačbe $ A = E_ (p_1) -E_ (p_2) = - (E_ (p_2) -E_ (p_1)) = - ∆E_p $ pomeni, da pri delu z notranjimi silami (na primer pri padcu telesa na tla pod delovanjem gravitacije v sistemu "kamen - Zemlja") se energija sistema zmanjša. Delo in sprememba potencialne energije v sistemu imata vedno nasprotna predznaka.
Ker delo določa le spremembo potencialne energije, ima v mehaniki fizični pomen le sprememba energije. Zato je izbira ničelne ravni energije poljubna in je določena izključno s premisleki priročnosti, na primer preprostosti pisanja ustreznih enačb.
Zakon spremembe in ohranjanja mehanske energije
Polna mehanska energija sistema vsota njegove kinetične in potencialne energije se imenuje:
Določena je s položajem teles (potencialna energija) in njihovo hitrostjo (kinetična energija).
Glede na izrek o kinetični energiji,
$ E_k-E_ (k_1) = A_p + A_ (pr), $
kjer je $ A_p $ delo potencialnih sil, $ A_ (pr) $ je delo ne-potencialnih sil.
Po drugi strani je delo potencialnih sil enako razliki potencialne energije telesa v začetnem $ E_ (p_1) $ in končnem $ E_p $ stanju. S tem v mislih dobimo izraz za zakon spremembe mehanske energije:
$ (E_k + E_p) - (E_ (k_1) + E_ (p_1)) = A_ (pr) $
kjer je leva stran enakosti sprememba skupne mehanske energije, desna pa delo nepotencialnih sil.
torej zakon spremembe mehanske energije se glasi:
Sprememba mehanske energije sistema je enaka delu vseh nepotencialnih sil.
Mehanski sistem, v katerem delujejo samo potencialne sile, se imenuje konzervativen.
V konzervativnem sistemu je $ A_ (pr) = 0 $. to pomeni zakon o ohranjanju mehanske energije:
V zaprtem konzervativnem sistemu se celotna mehanska energija ohranja (ne spreminja se s časom):
$ E_k + E_p = E_ (k_1) + E_ (p_1) $
Zakon ohranjanja mehanske energije izhaja iz Newtonovih zakonov mehanike, ki se uporabljajo za sistem materialnih točk (ali makrodelcev).
Vendar pa zakon ohranjanja mehanske energije velja tudi za sistem mikrodelcev, kjer sami Newtonovi zakoni ne veljajo več.
Zakon o ohranjanju mehanske energije je posledica homogenosti časa.
Časovna enotnost je v tem, da pri enakih začetnih pogojih potek fizikalnih procesov ni odvisen od trenutka, v katerem so ti pogoji ustvarjeni.
Zakon o ohranitvi skupne mehanske energije pomeni, da se mora s spremembo kinetične energije v konzervativnem sistemu spremeniti tudi njegova potencialna energija, tako da njihova vsota ostane konstantna. To pomeni možnost pretvorbe ene vrste energije v drugo.
V skladu z različnimi oblikami gibanja snovi se upoštevajo različne vrste energije: mehanska, notranja (enaka vsoti kinetične energije kaotičnega gibanja molekul glede na središče mase telesa in potencialne energije interakcije). molekul med seboj), elektromagnetni, kemični (ki ga sestavljajo kinetična energija gibanja elektronov in električne energije njihove interakcije med seboj in z atomskimi jedri), jedrski itd. Iz povedanega je jasno da je delitev energije na različne vrste precej poljubna.
Naravne pojave običajno spremlja pretvorba ene vrste energije v drugo. Tako na primer trenje delov različnih mehanizmov vodi do preoblikovanja mehanske energije v toploto, tj. notranja energija. Pri toplotnih motorjih, nasprotno, pride do transformacije notranje energije v mehansko energijo; v galvanskih celicah se kemična energija pretvarja v električno energijo itd.
Trenutno je pojem energije eden od osnovnih konceptov fizike. Ta koncept je neločljivo povezan z idejo o preoblikovanju ene oblike gibanja v drugo.
Tako je v sodobni fiziki formuliran koncept energije:
Energija je splošno kvantitativno merilo gibanja in interakcije vseh vrst snovi. Energija ne nastane iz nič in ne izgine, lahko le prehaja iz ene oblike v drugo. Koncept energije povezuje vse naravne pojave.
Preprosti mehanizmi. Učinkovitost mehanizmov
Preprosti mehanizmi se imenujejo naprave, ki spreminjajo velikost ali smer sil, ki delujejo na telo.
Uporabljajo se za premikanje ali dvigovanje velikih bremen z malo napora. Sem spadajo vzvod in njegove sorte - bloki (premični in fiksni), vrata, nagnjena ravnina in njene sorte - klin, vijak itd.
Ročica vzvoda. Pravilo finančnega vzvoda
Roka je trdno telo, ki se lahko vrti okoli fiksne podpore.

Pravilo finančnega vzvoda pravi:
Vzvod je v ravnotežju, če so sile, ki delujejo nanj, obratno sorazmerne z njihovimi rameni:
$ (F_2) / (F_1) = (l_1) / (l_2) $
Iz formule $ (F_2) / (F_1) = (l_1) / (l_2) $, pri čemer uporabimo lastnost sorazmernosti (proizvod skrajnih členov sorazmerja je enak produktu njegovih srednjih členov), lahko dobite naslednjo formulo:
Toda $ F_1l_1 = M_1 $ je moment sile, ki teži, da bi ročico obrnil v smeri urinega kazalca, in $ F_2l_2 = M_2 $ je moment sile, ki se nagiba k obrnjenju vzvoda v nasprotni smeri urnega kazalca. Tako je $ M_1 = M_2 $, kot je zahtevano.
Vzvod so ljudje začeli uporabljati že v starih časih. Z njegovo pomočjo je bilo mogoče dvigniti težke kamnite plošče med gradnjo piramid v starem Egiptu. Brez vzvoda to ne bi bilo mogoče. Dejansko je bilo na primer za gradnjo Cheopsove piramide, ki ima višino 147 m $, uporabljenih več kot dva milijona balvanov, od katerih je najmanjša imela maso 2,5 $ ton!
Danes se vzvodi pogosto uporabljajo tako v proizvodnji (na primer žerjavi) kot v vsakdanjem življenju (škarje, rezalniki žice, tehtnice).
Fiksni blok
Delovanje fiksnega bloka je podobno delovanju vzvoda z enakimi rokami: $ l_1 = l_2 = r $. Uporabljena sila $ F_1 $ je enaka obremenitvi $ F_2 $, ravnotežni pogoj pa je:
Fiksni blok uporablja se, ko je treba spremeniti smer sile, ne da bi spremenili njeno velikost.
Premični blok
Premični blok deluje kot vzvod, katerega kraki so: $ l_2 = (l_1) / (2) = r $. V tem primeru ima ravnotežni pogoj obliko:
kjer je $ F_1 $ uporabljena sila, $ F_2 $ je obremenitev. Uporaba premičnega bloka daje dvakratno povečanje moči.
Polyspast (blokovni sistem)

Običajni škripec je sestavljen iz $ n $ premičnih in $ n $ fiksnih blokov. Njegova uporaba daje pridobitev moči za 2n $-krat:
$ F_1 = (F_2) / (2n) $
Močna jermenica sestavljen iz n premičnih in enega fiksnega bloka. Uporaba škripčevega bloka moči daje povečanje moči za $ 2 ^ n $-krat:
$ F_1 = (F_2) / (2 ^ n) $

Vijak
Vijak je nagnjena ravnina, navita na os.

Pogoj ravnotežja za sile, ki delujejo na propeler, ima obliko:
$ F_1 = (F_2h) / (2πr) = F_2tgα, F_1 = (F_2h) / (2πR) $

kjer je $ F_1 $ - zunanja sila, ki deluje na vijak in deluje na razdalji $ R $ od njegove osi; $ F_2 $ - sila, ki deluje v smeri osi vijaka; $ h $ - korak vijaka; $ r $ - povprečni polmer navoja; $ α $ - kot nagiba niti. $ R $ je dolžina roke (ključa), ki zavrti vijak s silo $ F_1 $.
Učinkovitost
Koeficient uspešnosti (COP) - razmerje med koristnim delom in vsem porabljenim delom.
Učinkovitost je pogosto izražena v odstotkih in je označena z grško črko $ η $ ("to"):
$ η = (A_п) / (A_3) 100 % $
kjer je $ A_n $ koristno delo, $ A_3 $ je vse porabljeno delo.
Koristno delo je vedno le del celotnega dela, ki ga človek porabi z uporabo tega ali onega mehanizma.
Del popolnega dela se porabi za premagovanje sil trenja. Ker je $ A_3> A_n $, je učinkovitost vedno manjša od $ 1 $ (ali $< 100%$).
Ker je vsako delo v tej enakosti mogoče izraziti v obliki zmnožka ustrezne sile in prevožene razdalje, ga lahko prepišemo na naslednji način: $ F_1s_1≈F_2s_2 $.
Sledi, da, če zmagamo s pomočjo delujočega mehanizma, na poti izgubimo enako število krat in obratno... Ta zakon se imenuje zlato pravilo mehanike.
Zlato pravilo mehanike je približen zakon, saj ne upošteva dela za premagovanje trenja in gravitacije delov uporabljenih naprav. Kljub temu je lahko zelo koristen pri analizi delovanja katerega koli preprostega mehanizma.

Tako lahko na primer zahvaljujoč temu pravilu takoj rečemo, da bo delavec, prikazan na sliki, z dvakratnim povečanjem dvižne moči za 10 $ cm, moral nasprotni konec vzvoda spustiti za 20 $ $ cm.
Trčenje teles. Elastični in neelastični šok
Za reševanje problema gibanja teles po trku se uporabljajo zakoni ohranjanja gibalne količine in mehanske energije: vrednosti teh veličin po trku so določene iz znanih impulzov in energij pred trkom. Upoštevajte primere elastičnih in neelastičnih sunkov.
Udarec se imenuje popolnoma neelastičen, po katerem telesa tvorijo eno telo, ki se giblje z določeno hitrostjo. Problem hitrosti slednjega je rešen z uporabo zakona ohranjanja gibalne količine za sistem teles z maso $ m_1 $ in $ m_2 $ (če govorimo o dveh telesih) pred in po udarcu:
$ m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = (m_1 + m_2) υ↖ (→) $
Očitno se kinetična energija teles med neelastičnim udarcem ne ohrani (na primer za $ (υ_1) ↖ (→) = - (υ_2) ↖ (→) $ in $ m_1 = m_2 $ po udarcu postane nič) .
Šok se imenuje absolutno elastičen, pri katerem se ohrani ne le vsota impulzov, ampak tudi vsota kinetičnih energij udarnih teles.
Za popolnoma elastičen udarec, enačbe
$ m_1 (υ_1) ↖ (→) + m_2 (υ_2) ↖ (→) = m_1 (υ "_1) ↖ (→) + m_2 (υ" _2) ↖ (→); $
$ (m_ (1) υ_1 ^ 2) / (2) + (m_ (2) υ_2 ^ 2) / (2) = (m_1 (υ "_1) ^ 2) / (2) + (m_2 (υ" _2) ) ^ 2) / (2) $
kjer sta $ m_1, m_2 $ mase kroglic, $ υ_1, υ_2 $ hitrosti kroglic pred udarcem, $ υ "_1, υ" _2 $ hitrosti kroglic po udarcu.
Teme kodifikatorja USE: gibalna količina telesa, gibalna količina sistema teles, zakon o ohranitvi gibalne količine.
Pulz telo je vektorska količina, ki je enaka produktu telesne mase glede na njegovo hitrost:
Za impulz ni posebnih merskih enot. Dimenzija zagona je preprosto produkt dimenzije mase in dimenzije hitrosti:
Zakaj je koncept zagona zanimiv? Izkazalo se je, da je z njim mogoče dati Newtonovemu drugemu zakonu nekoliko drugačno, tudi izjemno uporabno obliko.
Newtonov drugi zakon v impulzni obliki
Naj je rezultanta sil, ki delujejo na telo mase. Začnemo z običajnim pisanjem Newtonovega drugega zakona:
Ob upoštevanju, da je pospešek telesa enak izvodu vektorja hitrosti, se Newtonov drugi zakon prepiše takole:
Pod predznakom izpeljanke uvedemo konstanto:
Kot lahko vidite, je derivat impulza pridobljen na levi strani:
. ( 1 )
Relacija (1) je nova oblika zapisa Newtonovega drugega zakona.
Newtonov drugi zakon v impulzni obliki. Izvod gibalne količine telesa je rezultanta sil, ki delujejo na telo.
Lahko rečete tudi to: nastala sila, ki deluje na telo, je enaka hitrosti spremembe v gibalnem gibanju telesa.
Izvod v formuli (1) lahko nadomestimo z razmerjem končnih prirastkov:
. ( 2 )
V tem primeru na telo v časovnem intervalu deluje povprečna sila. Manjša kot je vrednost, bližje je razmerje izpeljanki in bližje je povprečna sila njeni trenutni vrednosti v danem trenutku.
Pri opravilih je praviloma časovni interval precej kratek. To je lahko na primer čas, ko žogica zadene steno, nato pa povprečna sila, ki deluje na žogo s strani stene med udarcem.
Vektor na levi strani relacije (2) se imenuje sprememba zagona med . Sprememba gibalne količine je razlika med končnim in začetnim vektorjem zagona. Namreč, če je gibalna količina telesa v nekem začetnem trenutku, je gibalna količina telesa po določenem času, potem je sprememba gibalne količine razlika:
Ponovno poudarjamo, da je sprememba zagona razlika vektorjev (slika 1):
Na primer, pustite, da žoga leti pravokotno na steno (impulz pred udarcem je enak) in se odbije nazaj, ne da bi izgubil hitrost (impulz po udarcu je enak). Kljub dejstvu, da se modul impulza ni spremenil (), se impulz spremeni:
Geometrijsko je ta situacija prikazana na sl. 2:
Modul spremembe impulza je, kot vidimo, enak podvojenemu modulu začetnega impulza žogice:.
Prepišimo formulo (2) na naslednji način:
, ( 3 )
ali z opisom spremembe zagona, kot je opisano zgoraj:
Količina se imenuje impulz moči. Za impulz sile ni posebne merske enote; dimenzija impulza sile je preprosto produkt dimenzij sile in časa:
(Upoštevajte, da je to še ena možna merska enota za zagon telesa.)
Verbalna formulacija enakosti (3) je naslednja: sprememba gibalne količine telesa je enaka momentu sile, ki deluje na telo v določenem časovnem obdobju. To je seveda spet drugi Newtonov zakon v impulzni obliki.
Primer izračuna sile
Kot primer uporabe Newtonovega drugega zakona v impulzni obliki si oglejmo naslednji problem.
Naloga.
Kroglica mase g, ki leti vodoravno s hitrostjo m / s, zadene gladko navpično steno in se odbije od nje, ne da bi pri tem izgubila hitrost. Vpadni kot žoge (to je kot med smerjo gibanja žoge in pravokotnico na steno) je enak. Stavka traja za. Poiščite povprečno moč,
delovanje na žogo med udarcem.
Rešitev. Najprej pokažimo, da je odbojni kot enak vpadnemu kotu, to pomeni, da se bo žogica pod enakim kotom odbila od stene (slika 3).
Glede na (3) imamo:. Iz tega sledi, da je vektor spremembe v zagonu sousmerjen z vektorjem, torej usmerjenim pravokotno na steno v smeri odboja žoge (slika 5).
 |
| riž. 5. Na nalogo |
Vektorji in
enak po modulu
(ker se hitrost žoge ni spremenila). Torej, trikotnik, sestavljen iz vektorjev in je enakokraki. To pomeni, da je kot med vektorjema in enak, to pomeni, da je odbojni kot res enak vpadnemu kotu.
Poleg tega upoštevajte, da ima naš enakokraki trikotnik kot (to je vpadni kot); zato je ta trikotnik enakostranični. torej:
In potem zahtevana povprečna sila, ki deluje na žogo:
Impulz sistema teles
Začnimo s preprosto situacijo za sistem dveh teles. Namreč, naj obstajata telo 1 in telo 2 z impulzi oz. Zagon sistema teh teles je vektorska vsota impulzov vsakega telesa:
Izkazalo se je, da za zagon sistema teles obstaja formula, podobna Newtonovemu drugemu zakonu v obliki (1). Izvedemo to formulo.
Poklicali bomo vse druge predmete, s katerimi sta telesi 1 in 2, o katerih razmišljamo, v interakciji zunanjih teles. Imenujemo sile, s katerimi zunanji telesi delujeta na telesi 1 in 2 zunanje sile. Naj je nastala zunanja sila, ki deluje na telo 1. Podobno je nastala zunanja sila, ki deluje na telo 2 (slika 6).
Poleg tega lahko telesi 1 in 2 medsebojno delujeta. Naj telo 2 deluje na telo 1 s silo. Nato telo 1 deluje na telo 2 s silo. Po tretjem Newtonovem zakonu so sile in enake po velikosti in nasprotne smeri:. Sile in je notranje sile, ki delujejo v sistemu.
Zapišemo za vsako telo 1 in 2 Newtonov drugi zakon v obliki (1):
, ( 4 )
. ( 5 )
Dodajmo enakosti (4) in (5):
Na levi strani dobljene enakosti je vsota izpeljank, enaka izvodu vsote vektorjev in. Na desni strani imamo na podlagi Newtonovega tretjega zakona:
Toda - to je impulz sistema teles 1 in 2. Označimo tudi - to je rezultanta zunanjih sil, ki delujejo na sistem. Dobimo:
. ( 6 )
tako, hitrost spremembe gibalne količine sistema teles je rezultat zunanjih sil, ki delujejo na sistem. Enakost (6), ki igra vlogo Newtonovega drugega zakona za sistem teles, je tisto, kar smo želeli doseči.
Formula (6) je bila izpeljana za primer dveh teles. Zdaj pa posplošimo naše sklepanje na primer poljubnega števila teles v sistemu.
Impulz sistema teles teles imenujemo vektorska vsota impulzov vseh teles, vključenih v sistem. Če je sistem sestavljen iz teles, potem je zagon tega sistema:
Nato je vse narejeno na popolnoma enak način kot zgoraj (le tehnično je videti nekoliko bolj zapleteno). Če za vsako telo zapišemo enakosti, podobni (4) in (5), in nato dodamo vse te enakosti, potem na levi strani spet dobimo izvod impulza sistema, na desni strani pa bo samo vsota zunanjih sil (notranje sile, seštevanje v parih, bo dalo nič glede na Newtonov tretji zakon). Zato enakost (6) v splošnem primeru ostane veljavna.
Zakon o ohranjanju impulza
Sistem teles se imenuje zaprto,če so delovanja zunanjih teles na telesa danega sistema bodisi zanemarljivo majhna ali pa se medsebojno izničujejo. Tako je v primeru zaprtega sistema teles bistvena le interakcija teh teles med seboj, ne pa tudi z drugimi telesi.
Rezultanta zunanjih sil, ki delujejo na zaprt sistem, je nič:. V tem primeru iz (6) dobimo:
Če pa izpeljanka vektorja izgine (hitrost spremembe vektorja je nič), se sam vektor s časom ne spremeni:
Zakon o ohranjanju impulza. Zagon zaprtega sistema teles ostane skozi čas konstanten za kakršne koli interakcije teles znotraj tega sistema.
Najenostavnejši problemi o zakonu ohranjanja gibalne količine se rešujejo po standardni shemi, ki jo bomo zdaj pokazali.
Naloga. Telo mase g se giblje s hitrostjo m/s po gladki vodoravni površini. Telo mase r se giblje proti njemu s hitrostjo m/s. Pojavi se popolnoma neelastičen šok (telesa se držijo skupaj). Poiščite hitrost teles po udarcu.
Rešitev. Situacija je prikazana na sl. 7. Os je usmerjena proti gibanju prvega telesa.
 |
| riž. 7. Na nalogo |
Ker je površina gladka, ni trenja. Ker je površina vodoravna in se vzdolž nje dogaja gibanje, se sila gravitacije in reakcija podpore medsebojno uravnotežita:
Tako je vektorska vsota sil, ki delujejo na sistem teh teles, enaka nič. To pomeni, da je sistem teles zaprt. Zato je zanj izpolnjen zakon o ohranitvi zagona:
. ( 7 )
Impulz sistema pred udarcem je vsota impulzov teles:
Po neelastičnem udarcu je bilo pridobljeno eno telo mase, ki se premika z zahtevano hitrostjo:
Iz zakona o ohranitvi gibalne količine (7) imamo:
Od tu najdemo hitrost telesa, ki je nastala po udarcu:
Pojdimo k projekcijam na osi:
Po pogoju imamo: m / s, m / s, tako da
Znak minus označuje, da se zlepljena telesa premikajo v nasprotni smeri od osi. Hitrost iskanja: m/s.
Zakon o ohranitvi projekcije impulza
Pri nalogah se pogosto srečujemo z naslednjo situacijo. Sistem teles ni zaprt (vektorska vsota zunanjih sil, ki delujejo na sistem, ni nič), vendar obstaja taka os, vsota projekcij zunanjih sil na os je nič v vsakem trenutku. Potem lahko rečemo, da se vzdolž dane osi naš sistem teles obnaša kot zaprt, projekcija gibalne količine sistema na os pa je ohranjena.
Pokažimo to bolj strogo. Enakost (6) projiciramo na os:
Če projekcija rezultantnih zunanjih sil izgine, potem
Zato je projekcija konstanta:
Zakon o ohranitvi projekcije impulza. Če je projekcija na os vsote zunanjih sil, ki delujejo na sistem, enaka nič, se projekcija zagona sistema sčasoma ne spreminja.
Oglejmo si primer specifičnega problema, kako deluje zakon o ohranitvi projekcije zagona.
Naloga. Množični deček, ki drsa po gladkem ledu, vrže masni kamen pod kotom proti obzorju. Poišči hitrost, s katero se deček vrže nazaj, potem ko je bil vržen.
Rešitev. Situacija je shematično prikazana na sl. osem . Fant je upodobljen kot naravnost.
 |
| riž. 8. Na nalogo |
Impulz sistema "fant + kamen" ni shranjen. To je razvidno vsaj iz dejstva, da se po metu pojavi navpična komponenta impulza sistema (in sicer navpična komponenta impulza kamna), ki je pred metom ni bilo.
Zato sistem, ki ga tvorita deček in kamen, ni zaprt. Zakaj? Dejstvo je, da vektorska vsota zunanjih sil med metom ni enaka nič. Vrednost je večja od vsote in zaradi tega presežka se pojavi navpična komponenta gibalne količine sistema.
Vendar zunanje sile delujejo samo navpično (brez trenja). Zato se projekcija gibalne količine na vodoravno os ohrani. Pred metom je bila ta projekcija nič. Usmerimo os proti metu (tako, da je fant šel v smeri negativne polose), dobimo.
V vsakdanjem življenju se za karakterizacijo osebe, ki izvaja spontana dejanja, včasih uporablja epitet "impulziven". Hkrati se nekateri sploh ne spomnijo, pomemben del pa sploh ne ve, s kakšno fizično količino je ta beseda povezana. Kaj se skriva pod pojmom "telesni impulz" in kakšne lastnosti ima? Tako veliki znanstveniki, kot sta René Descartes in Isaac Newton, so iskali odgovore na ta vprašanja.
Kot vsaka znanost tudi fizika deluje z jasno formuliranimi koncepti. Trenutno je za količino, imenovano impulz telesa, sprejeta naslednja definicija: to je vektorska količina, ki je mera (količina) mehanskega gibanja telesa.
Recimo, da je vprašanje obravnavano v okviru klasične mehanike, torej verjamemo, da se telo giblje z običajno in ne z relativistično hitrostjo, kar pomeni, da je vsaj za red manjša od hitrosti svetlobe v vakuumu. . Nato se impulzni modul telesa izračuna s formulo 1 (glej sliko spodaj).
Tako je ta vrednost po definiciji enaka zmnožku telesne mase s svojo hitrostjo, s katero je sousmerjen njegov vektor.
V SI (Mednarodni sistem enot) se za mersko enoto za impulz vzame 1 kg / m / s.
Od kod je prišel izraz "impulz"?
Nekaj stoletij preden se je v fiziki pojavil koncept količine mehanskega gibanja telesa, je veljalo, da je vzrok za vsako gibanje v prostoru posebna sila - zagon.
V 14. stoletju je Jean Buridan prilagodil ta koncept. Predlagal je, da ima leteči tlakovec impulz, ki je neposredno sorazmeren s svojo hitrostjo, ki bi bil nespremenjen, če ne bi bilo zračnega upora. Hkrati pa so po mnenju tega filozofa imela telesa z večjo težo sposobnost "vsebovati" več takšne gonilne sile.
Nadaljnji razvoj koncepta, kasneje imenovanega impulz, je dal Rene Descartes, ki ga je označil z besedami "momentum". Ni pa upošteval, da ima hitrost smer. Zato je teorija, ki jo je predlagal, v nekaterih primerih v nasprotju z izkušnjami in ni našla priznanja.

Angleški znanstvenik John Wallis je prvi uganil, da bi moral imeti zagon tudi smer. Zgodilo se je leta 1668. Vendar pa je trajalo še nekaj let, da je oblikoval dobro znani zakon o ohranitvi gibalne količine. Teoretični dokaz tega dejstva, empirično ugotovljen, je dal Isaac Newton, ki je uporabil tretji in drugi zakon klasične mehanike, ki ju je odkril in poimenoval po njem.
Zagon sistema materialnih točk
Poglejmo najprej primer, ko govorimo o hitrostih, ki so veliko nižje od svetlobne hitrosti. Potem je po zakonih klasične mehanike celoten zagon sistema materialnih točk vektorska količina. Enaka je vsoti produktov njihovih mas pri hitrosti (glej formulo 2 na zgornji sliki).
V tem primeru je zagon ene materialne točke vzet kot vektorska količina (formula 3), ki je sosmerna s hitrostjo delca.
Če govorimo o telesu končne velikosti, ga najprej miselno razbijemo na majhne dele. Tako se ponovno upošteva sistem materialnih točk, vendar se njegov zagon ne izračuna z navadnim seštevanjem, temveč z integracijo (glej formulo 4).
Kot lahko vidite, ni časovne odvisnosti, zato impulz sistema, na katerega zunanje sile ne vplivajo (ali pa se njihov vpliv medsebojno kompenzira), sčasoma ostane nespremenjen.

Dokaz o ohranitvenem zakonu
Nadaljujmo z obravnavanjem telesa končne velikosti kot sistema materialnih točk. Za vsakega od njih je Newtonov drugi zakon oblikovan v skladu s formulo 5.
Bodimo pozorni na dejstvo, da je sistem zaprt. Potem, ko seštejemo vse točke in uporabimo Newtonov tretji zakon, dobimo izraz 6.
Tako je impulz zaprtega sistema konstanten.
Zakon o ohranjanju velja tudi v primerih, ko je skupna količina sil, ki delujejo na sistem od zunaj, enaka nič. Iz tega izhaja ena pomembna posebna izjava. Pravi, da je impulz telesa stalen, če ni zunanjega vpliva ali je kompenziran vpliv več sil. Na primer, če po udarcu s palico ni trenja, mora plošč obdržati zagon. Takšno stanje bomo opazili tudi kljub dejstvu, da na telo vplivata sila teže in reakcija podpore (led), saj sta, čeprav sta po velikosti enaka, usmerjena v nasprotni smeri, tj. drug drugega kompenzirajo.
Lastnosti
Zagon telesa ali materialne točke je aditivna količina. Kaj to pomeni? Vse je preprosto: impulz mehanskega sistema materialnih točk je sestavljen iz impulzov vseh materialnih točk, ki so vključene v sistem.
Druga lastnost te količine je, da ostane nespremenjena med interakcijami, ki spreminjajo le mehanske lastnosti sistema.
Poleg tega je zagon nespremenljiv glede na katero koli rotacijo referenčnega okvira.

Relativistični primer
Recimo, da govorimo o materialnih točkah brez interakcije s hitrostmi reda 10 na 8. potenco ali nekoliko manj v sistemu SI. Tridimenzionalni impulz se izračuna po formuli 7, kjer c razumemo hitrost svetlobe v vakuumu.
V primeru, ko je zaprt, velja zakon o ohranitvi gibalne količine. Hkrati pa tridimenzionalni zagon ni relativistično invariantna količina, saj obstaja njegova odvisnost od referenčnega okvira. Obstaja tudi 4D možnost. Za eno materialno točko se določi s formulo 8.
Impulz in energija
Te količine, pa tudi masa, so med seboj tesno povezane. V praktičnih problemih se običajno uporabljata razmerja (9) in (10).

Definicija skozi de Brogliejeve valove
Leta 1924 je bila domneva, da imajo ne samo fotoni, ampak tudi kateri koli drugi delci (protoni, elektroni, atomi) dualnost valov in delcev. Njegov avtor je bil francoski znanstvenik Louis de Broglie. Če to hipotezo prevedemo v jezik matematike, potem lahko trdimo, da je s katerim koli delcem, ki ima energijo in zagon, val povezan s frekvenco in dolžino, izraženo s formulama 11 oziroma 12 (h je Planckova konstanta).
Iz zadnje relacije ugotovimo, da sta impulzni modul in valovna dolžina, označena s črko »lambda«, obratno sorazmerna drug drugemu (13).
Če upoštevamo delec z relativno nizko energijo, ki se giblje s hitrostjo, ki ni sorazmerna s svetlobno hitrostjo, potem se modul gibalne količine izračuna na enak način kot v klasični mehaniki (glej formulo 1). Zato je valovna dolžina izračunana po izrazu 14. Z drugimi besedami, obratno sorazmerna je zmnožku mase in hitrosti delca, to je njegovega giba.

Zdaj veste, da je impulz telesa merilo mehanskega gibanja, in spoznali ste njegove lastnosti. Med njimi je v praktičnem smislu še posebej pomemben Zakon o ohranjanju. Tudi ljudje, ki so daleč od fizike, ga opazujejo v vsakdanjem življenju. Na primer, vsi vedo, da strelno orožje in artilerijski deli dajejo odboj pri streljanju. Zakon o ohranitvi zagona je jasno prikazan z igro biljarda. Z njegovo pomočjo lahko predvidite smer širjenja kroglic po udarcu.
Zakon je našel uporabo v izračunih, potrebnih za preučevanje posledic morebitnih eksplozij, pri izdelavi reaktivnih vozil, pri oblikovanju strelnega orožja in na mnogih drugih področjih življenja.
Krogla kalibra .22 ima maso le 2 g. Če takšno kroglo vržeš v nekoga, jo zlahka ujame tudi brez rokavic. Če poskušate ujeti takšno kroglo, ki je izletela iz gobca s hitrostjo 300 m / s, potem tudi rokavice tukaj ne bodo pomagale.
Če se po vas kotali voziček z igračami, ga lahko ustavite s prstom na nogi. Če se na vas zapelje tovornjak, se morate umakniti s poti.


Razmislite o problemu, ki prikazuje razmerje med impulzom sile in spremembo impulza telesa.
Primer. Masa žoge je 400 g, hitrost, ki jo je krogla pridobila po udarcu, je 30 m / s. Sila, s katero je noga delovala na žogico, je bila 1500 N, čas udarca pa 8 ms. Poišči zagon sile in spremembo gibalne količine telesa za žogo.

Sprememba telesnega impulza
Primer. Ocenite povprečno silo s tal na žogo med udarcem.
1) Med udarcem na žogo delujeta dve sili: reakcijska sila podpore in sila teže.

Reakcijska sila se s časom udarca spreminja, zato je mogoče najti povprečno silo reakcije spola.
2) Sprememba zagona  telo prikazano na sliki
telo prikazano na sliki

3) Iz drugega Newtonovega zakona

Glavna stvar, ki si jo je treba zapomniti
1) Formule telesnega impulza, impulza sile;
2) Smer impulznega vektorja;
3) Poišči spremembo gibalne količine telesa
Splošna izpeljava Newtonovega drugega zakona

Graf F (t). Spremenljiva moč
Impulz sile je številčno enak površini figure pod grafom F (t).

Če na primer sila ni konstantna v času, se linearno povečuje F = kt, potem je impulz te sile enak površini trikotnika. To silo lahko zamenjate s tako konstantno silo, ki bo v istem časovnem obdobju spremenila zagon telesa za enako količino.

Povprečna rezultantna sila
ZAKON OHRANJANJA IMPULZA
Spletno testiranje
Zaprt sistem teles
To je sistem teles, ki samo medsebojno delujejo. Zunanjih sil interakcije ni.
V resničnem svetu tak sistem ne more obstajati; ni mogoče odstraniti vseh zunanjih interakcij. Zaprt sistem teles je fizični model, tako kot je materialna točka model. To je model sistema teles, ki naj bi medsebojno delovala samo med seboj, zunanje sile se ne upoštevajo, zanemarjajo se.
Zakon o ohranjanju impulza
V zaprtem sistemu teles vektor vsota impulzov teles se pri medsebojnem delovanju teles ne spremeni. Če se je impulz enega telesa povečal, to pomeni, da se je impulz nekega drugega telesa (ali več teles) v tem trenutku zmanjšal za popolnoma enako količino.
Poglejmo primer. Deklica in fant drsata. Zaprt sistem teles - dekle in fant (trenje in druge zunanje sile zanemarimo). Deklica miruje, njen zagon je nič, saj je hitrost nič (glej formulo za zagon telesa). Potem ko fant, ki se giblje z določeno hitrostjo, trči v deklico, se bo začela premikati tudi ona. Zdaj ima njeno telo impulz. Številčna vrednost impulza deklice je popolnoma enaka, za koliko se je dečkov impulz zmanjšal po trku.
Eno telo, težko 20 kg, se giblje s hitrostjo, drugo telo, težko 4 kg, se giblje v isto smer s hitrostjo. Kakšni so impulzi vsakega telesa. Kakšen je zagon sistema?


Impulz sistema teles je vektorska vsota impulzov vseh teles, vključenih v sistem. V našem primeru je to vsota dveh vektorjev (ker obravnavamo dve telesi), ki sta usmerjena v isto smer, torej

Zdaj pa izračunajmo zagon sistema teles iz prejšnjega primera, če se drugo telo premika v nasprotni smeri.

Ker se telesa gibljejo v nasprotnih smereh, dobimo vektorsko vsoto impulzov v različnih smereh. Več o vsoti vektorjev.
Glavna stvar, ki si jo je treba zapomniti
1) Kaj je zaprt sistem teles;
2) Zakon o ohranitvi gibalne količine in njegova uporaba
Impulz v fiziki
V prevodu iz latinščine "impulz" pomeni "potisniti". Ta fizična količina se imenuje tudi "kvantiteta gibanja". V znanost je bil uveden približno v istem času, ko so bili odkriti Newtonovi zakoni (ob koncu 17. stoletja).
Veja fizike, ki preučuje gibanje in medsebojno delovanje materialnih teles, je mehanika. Impulz v mehaniki je vektorska količina, ki je enaka produktu mase telesa na njegovo hitrost: p = mv. Smeri vektorjev zagona in hitrosti vedno sovpadata.
V sistemu SI se za enoto impulza šteje impulz telesa, ki tehta 1 kg, ki se premika s hitrostjo 1 m / s. Zato je enota gibanja SI 1 kg ∙ m / s.
Pri računskih problemih se upoštevajo projekcije vektorjev hitrosti in gibalne količine na katero koli os in uporabljajo enačbe za te projekcije: na primer, če je izbrana os x, se upoštevata projekciji v (x) in p (x). Po definiciji zagona so te količine povezane z razmerjem: p (x) = mv (x).
Glede na to, katera os je izbrana in kam je usmerjena, je projekcija impulznega vektorja nanjo lahko pozitivna ali negativna.
Zakon o ohranjanju impulza
Impulzi materialnih teles med njihovo fizično interakcijo se lahko spremenijo. Na primer, ko trčita dve kroglici, obešeni na niti, se njuni impulzi medsebojno spreminjajo: ena krogla se lahko premakne iz mirujočega stanja ali poveča svojo hitrost, druga pa lahko, nasprotno, zmanjša svojo hitrost ali se ustavi. Vendar pa v zaprtem sistemu, t.j. ko telesa medsebojno delujejo samo med seboj in niso podvržena vplivu zunanjih sil, ostane vektorska vsota impulzov teh teles konstantna za vsako njihovo interakcijo in gibanje. To je zakon o ohranitvi zagona. Matematično ga je mogoče razbrati iz Newtonovih zakonov.
Zakon o ohranitvi gibalne količine velja tudi za takšne sisteme, kjer na telesa delujejo nekatere zunanje sile, vendar je njihova vektorska vsota enaka nič (na primer, sila teže je uravnotežena s silo elastičnosti površine). Običajno se tak sistem lahko šteje tudi za zaprt.
V matematični obliki je zakon ohranjanja gibalne količine zapisan takole: p1 + p2 +… + p (n) = p1 ’+ p2’ +… + p (n) ’(momenti p so vektorji). Za sistem dveh teles je ta enačba videti kot p1 + p2 = p1 ’+ p2’ ali m1v1 + m2v2 = m1v1 ’+ m2v2’. Na primer, v obravnavanem primeru s kroglami bo skupni zagon obeh kroglic pred interakcijo enak skupnemu gibu po interakciji.