Kuidas tuletada pendli inertsmomendi valemit. Pendli inertsmomendi arvutamine. Kaudsete mõõtmiste vead
MAXWELLA
Töö eesmärk: jäiga keha tasapinnalise liikumise uurimine Maxwelli pendli näitel; Maxwelli pendli inertsmomendi arvutamine.
Teoreetiline osa
Klassikalise mehaanika põhipositsiooni kohaselt võib jäiga keha mis tahes liikumist kujutada kahe lihtsa liikumise tüübi superpositsioonina: translatsiooni- ja pöörlemissuunas. Translatsioonilise liikumise käigus saavad kõik keha punktid võrdse aja jooksul võrdse suuruse ja suunaga liikumisi, mille tulemusena on kõikide punktide kiirused ja kiirendused igal ajahetkel ühesugused. Pöörleva liikumise ajal liiguvad kõik jäiga keha punktid ringidena, mille keskpunktid asuvad samal sirgel, mida nimetatakse pöörlemisteljeks. Pöörleva liikumise jaoks peate igal ajahetkel määrama pöörlemistelje asukoha ruumis ja keha nurkkiiruse.
Huvitav on võrrelda pöörleva jäiga keha mehaanika põhisuurusi ja valemeid ning materiaalse punkti translatsioonilist liikumist. Mugavuse huvides on selline võrdlus toodud tabelis 6.1. Tabel näitab, et üleminek suhetes translatsioonilt liikumiselt pöörlevale liikumisele toimub kiiruse asendamisega – nurkkiirusel, kiirendusel – nurkkiirenduse kohta jne.
Tabel 6.1
| Edasi liikumine | Pöörlev liikumine |
| – tee – lineaarne kiirus – lineaarne kiirendus – kehamass – keha impulss – jõudu – dünaamika põhiseadus – kineetiline energia – Töö | – pöördenurk – nurkkiirus – nurkkiirendus – inertsimoment – nurkmoment – jõu hetk – dünaamika põhiseadus – kineetiline energia – Töö |
 Antud töös käsitletakse tasapinnalist liikumist, s.o. selline, kus keha osaleb samaaegselt translatiivsetes ja pöörlevates liikumistes. Tasapinnalise liikumise näide on silindri veeremine piki tasapinda (joonis 6.1). Seda liikumist saab kujutada kahe liigutuse summana –
translatsiooniline kiirusega ja pöörlemine nurkkiirusega, joonisel kulgeb pöörlemistelg risti joonise tasapinnaga. Seega on keha iga punkti kiirendus translatsioonilise liikumise kiirenduse ja ümber massikeskpunkti läbiva telje pöörlemise ajal tekkiva kiirenduse summa. Translatsioonilise liikumise kiirendus on keha kõigi punktide jaoks ühesugune ja võrdne:
Antud töös käsitletakse tasapinnalist liikumist, s.o. selline, kus keha osaleb samaaegselt translatiivsetes ja pöörlevates liikumistes. Tasapinnalise liikumise näide on silindri veeremine piki tasapinda (joonis 6.1). Seda liikumist saab kujutada kahe liigutuse summana –
translatsiooniline kiirusega ja pöörlemine nurkkiirusega, joonisel kulgeb pöörlemistelg risti joonise tasapinnaga. Seega on keha iga punkti kiirendus translatsioonilise liikumise kiirenduse ja ümber massikeskpunkti läbiva telje pöörlemise ajal tekkiva kiirenduse summa. Translatsioonilise liikumise kiirendus on keha kõigi punktide jaoks ühesugune ja võrdne:
Kus – kõigi välisjõudude resultant, – kehamass. Kiirenduse suund langeb kokku tekkiva jõu suunaga.
Pöörleva liikumise kiirendus ümber keha massikeskpunkti läbiva telje on võrdne:
Kus – kõigi välisjõudude hetk keha massikeskpunkti läbiva telje suhtes, – keha inertsmoment sama telje ümber. Käesolevas töös uuritakse keha tasapinnalist liikumist Maxwelli pendli liikumise näitel. Maxwelli pendel koosneb metallvardast – teljed AB millele on sümmeetriliselt paigaldatud ketas KOOS(joonis 6.2). Telje otste külge on kinnitatud kaks keerme, mis on eelnevalt ümber telje keritud. Keermete vastasotsad kinnitatakse ülemise klambri külge. Ketas langetatakse raskusjõu toimel keermedele, mis kerivad lahti täies pikkuses. Ketas, jätkates oma pöörlemisliikumist samas suunas, kerib keermed ümber telje, mille tulemusena tõuseb see üles, aeglustades samal ajal pöörlemist. Ülemisse punkti jõudes läheb ketas uuesti alla jne. Ketas võngub üles-alla, mistõttu nimetatakse sellist seadet pendliks. Töö sisuks on määrata pendli inertsimoment ja võrrelda saadud tulemusi teadaolevate valemite abil teoreetiliselt arvutatutega.
Kehade inertsmomendi määramine võnkemeetodil
Füüsiline pendel on jäik keha, mis on võimeline võnkuma ümber tema massikeskme kohal asuva telje. See "seade" osutub väga kasulikuks. Seega määratakse selle abiga gravitatsioonikiirendus väga lihtsalt ja suure täpsusega. Samuti võimaldab füüsiline pendel määrata erinevate tahkete kehade inertsimomente.
Pendli väikesed võnked ümber telje on selle väikesed pöörded vastassuundades, nii et füüsikalise pendli võnkumiste mõistmiseks on vaja mõista pöörlemise mehaanikat. Pöörlemismehaanika on tihedalt sarnane translatsioonilise liikumise mehaanikaga. Analoogia avaldub mehaanika põhikontseptsioonides, selle ideedes ja seadustes ning selle tulemusena - valemites ja võrrandites, mis on mugavalt esitatud "analoogiate tabelina", mida tuleks kindlalt mõista:
I. Kinemaatika
Tõlkeliikumine Pöörlev liikumine
II. Dünaamika
Dünaamika põhiseadus (liikumisvõrrand)
| a=F/m | e = M/I z |
Näeme, et pöörlemise dünaamikasse on ilmunud kolm uut keerukate nimedega suurust: jõumoment, inertsimoment, impulsimoment (teise nimega nurkmoment aka pöörlemisimpulss !). Lugejal ärgu valutagu selliste nimede pärast peavalu; need ilmnesid möödunud sajandite terminoloogiliste väärarusaamade tulemusena, millele lisandus võõrkeeltest tõlkimise ebapiisavus; Nende nimede tähendusse on täiesti kasutu süveneda. Peate neid lihtsalt meeles pidama. Impulsi hetkeks saavutab see arusaamatus maksimumi – koguni kolm nime. Õnneks osutus üks neist korralikuks - pöörlemisimpulss , mis lihtsalt peegeldab selle analoogiat translatsioonilise liikumise vastava suuruse – tavalise impulsiga.
Selgitagem jõumomenti M ja inertsimoment I z .
Võimu hetk. Võtame telje külge kinnitatud jäiga keha. Rakendame sellele mingil hetkel jõudu ja laseme selle jõu toimejoonel ristuda pöörlemisteljega. Selline jõud kas painutab pöörlemistelge või rebib telje koos kehaga välja, ei midagi enamat.
Muudame katset veidi – nihutame sama jõu toimejoont teljelt kauguse võrra l. Mõju on tunda kohe: keha hakkab kergesti pöörduma. Jõud omandas keha pööramise võime. See jõu võimet pöörduda nimetatakse "jõumomendiks" . Igapäevane kogemus ütleb meile, et jõu võime keha pöörata ei sõltu ainult tugevusest, vaid ka " jõu õlg" l(lühem kaugus jõu toimejoonest pöörlemisteljeni). Lõpuks jõumomendi suurus on võrdne jõu ja käe korrutisega:
Inertsimoment telje suhtes. Nagu juba "analoogiatabelis" märgitud, inertsimoment (jätke tarka nime tähelepanuta!) - suurus, mis iseloomustab keha inertsust pöörlemisel. Vaatleme kahte toppi, mis on kuju ja suurusega täiesti identsed, kuid märgatavalt erineva massiga, näiteks alumiiniumist ja pliist. Avastame hõlpsasti, et alumiiniumist ülaosa on palju lihtsam teatud kiiruseni tsentrifuugida (ja ka siis peatada!) kui plii. See tähendab, et keha inerts selle pöörlemise ajal on võrdeline selle massiga.
Veelgi enam, kui meil oleks võimalus mis tahes ülaosa oluliselt lamendada, nihutades märkimisväärse osa selle massist pöörlemisteljest võimalikult kaugele, muutes selle kettaks, avastaksime kohe, et selle pöörlemine muutus märgatavalt raskemaks ( ja peatada) see võrreldes ajaga, mil see oli kompaktne. See tähendab, et keha inerts pöörlemisel ei sõltu mitte ainult massist, vaid ka selle osade eemaldamise astmest pöörlemisteljelt.
Materiaalse punkti massiga m, mis asub kaugusel r z-telje suhtes, inertsimoment(riis . 1), on suurus, mis võrdub selle massi korrutisega pöörlemistelje vahelise kauguse ruuduga
I z = mr 2(2)
 Kui suur on suvalise keha inertsimoment (joonis 2)? Kogemused näitavad, et see on võrdne nende osade inertsmomentide summaga, milleks iga keha saab jagada. Tähelepanuväärne on, et inertsmomendi suurus ei sõltu terviku osadeks jagamise meetodist (seda omadust nimetatakse aditiivsuseks; see on meile kasulik laboritööde tulemuste kontrollimisel). Keha lõhkumine väga väikesteks, peaaegu punktmassideks Dm i, millest igaüks on pöörlemisteljest teatud kaugusel r i, võttes arvesse inertsmomendi liitivust ja määratlust (2) jaoks I z materiaalne punkt, saame üldavaldise suvalise keha inertsimoment telje suhtes Z nende materiaalsete punktide inertsmomentide summa kujul, milleks keha on jagatud:
Kui suur on suvalise keha inertsimoment (joonis 2)? Kogemused näitavad, et see on võrdne nende osade inertsmomentide summaga, milleks iga keha saab jagada. Tähelepanuväärne on, et inertsmomendi suurus ei sõltu terviku osadeks jagamise meetodist (seda omadust nimetatakse aditiivsuseks; see on meile kasulik laboritööde tulemuste kontrollimisel). Keha lõhkumine väga väikesteks, peaaegu punktmassideks Dm i, millest igaüks on pöörlemisteljest teatud kaugusel r i, võttes arvesse inertsmomendi liitivust ja määratlust (2) jaoks I z materiaalne punkt, saame üldavaldise suvalise keha inertsimoment telje suhtes Z nende materiaalsete punktide inertsmomentide summa kujul, milleks keha on jagatud:
![]() (3)
(3)
Piiril, millal Dm i on rangelt teisendatud materiaalseteks punktideks, summa (3) taandatakse keha ruumala integraaliks ja lihtsa (korrapärase) kujuga kehade puhul arvutatakse see täpselt välja (korrapärase kujuga kehade inertsmomentide tabelit saab leidub teatmeteostes ja üldfüüsika õpikutes). Märgime kokkuvõtteks kasulikku valemit, mida tuntakse Steineri teoreemina ja mis võimaldab leida keha inertsimomenti suvalise telje suhtes Z, kui on teada keha inertsimoment Ic inertsikeskpunkti läbiva telje ümber C (teise nimega massikese ehk raskuskese) ja paralleelselt selle teljega:
I z = I c+ ma 2, (4)
Siin m- kehamass, a– telgede vaheline kaugus.
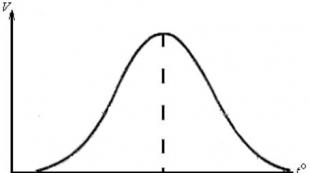
Nüüd oleme valmis arvestama füüsikalise pendli võnkumisi (joonis 3). Kui te kaldute selle tasakaaluasendist väikese nurga võrra kõrvale φ ja jättes omaette, hakkab see tekitama "väikesi" vibratsioone. Võnkumiste kirjeldamiseks kasutame üht peamist füüsiliste probleemide lahendamise meetodit - liikumisvõrrandi meetod.
Liikumisvõrrand pöörlemisdünaamikas on juba “analoogiatabelis” kirjas; see peegeldab pöörlemise dünaamika põhiseadust: kui kehale mõjub väline jõud, mis põhjustab jõumomendi tekkimist, siis keha pöörleb ja selle nurkiirendus on võrdeline jõumomendiga ja pöördvõrdeline inertsmomendiga:
(5)
 Eeldame, et gravitatsioon, meie probleemi ainus jõud, rakendub pendli massikeskmele (see tehnika on teoreetilises mehaanikas rangelt õigustatud). See jõud loob pöördetelje suhtes momendi, mis on võrdne
Eeldame, et gravitatsioon, meie probleemi ainus jõud, rakendub pendli massikeskmele (see tehnika on teoreetilises mehaanikas rangelt õigustatud). See jõud loob pöördetelje suhtes momendi, mis on võrdne
M = -Pl = - Pa sinφ = - mga sinφ ≈ - mgaφ(6)
Siin võetakse arvesse, et pendli väikeste kõrvalekallete korral saab nurga siinuse asendada selle argumendiga (väljendatuna radiaanides) sinφ ≈φ. Miinusmärk näitab, et kui pendlit pöörata nurga φ võrra vastupäeva, siis tekib gravitatsioonimoment, mis kipub pendlit päripäeva pöörama, s.t. viige see tagasi tasakaaluasendisse.
Võrrandis (5) soovitud kogus I z. Jääb üle nurkkiirendus dešifreerida. Paindenurk φ (nurktee!) oleneb ajast ja nurkkiirendus on alati nurktee teine tuletis aja suhtes (vt “analoogiate tabel”).
INERTSIMEMTE MÄÄRAMINE
FÜÜSIKALINE PENDEL
Töö eesmärk: füüsikalise pendliga tutvumine ja selle inertsmomendi määramine pöörlemistelje suhtes. Pendli inertsmomendi suuruse sõltuvuse uurimine massi ruumilisest jaotusest.
Seadmed ja tarvikud: füüsiline pendel selle vedrustuse kronsteiniga, metallprisma pendli raskuskeskme asukoha määramiseks, stopper.
Teoreetiline sissejuhatus.
Füüsikaline pendel (joonis 1) on igasugune jäik keha, mis raskusjõu mõjul võngub ümber fikseeritud horisontaaltelje (O), mis ei läbi selle raskuskeset (C). Pendli riputuspunkt on pöörlemise keskpunkt.
Joonis 1. Füüsiline pendel
Kui pendel kaldub tasakaaluasendist kõrvale nurga võrra, tekib raskusjõu poolt tekitatud pöördemoment:

 ,
,
Kus l– kaugus riputuspunkti ja pendli raskuskeskme vahel (miinusmärk tuleneb sellest, et jõumoment M on sellise suunaga, et kipub pendlit tasakaaluasendisse tagasi viima, s.t. nurga vähendamine ).
Väikeste läbipaindenurkade jaoks  , Siis
, Siis
 (0)
(0)
Teisest küljest saab taastava jõu hetke kirjutada järgmiselt:
 (0)
(0)
I– pendli inertsimoment
i- nurkkiirendus.
Punktidest (1) ja (2) saame:

 .
.
Määramine  (0)
(0)
saame  (4)
(4)
Võrrand (4) on teist järku lineaarne diferentsiaalvõrrand. Selle lahendus on väljend  .
.
Võttes arvesse võrrandit (3), võib füüsikalise pendli väikeste võnkumiste perioodi kirjutada järgmiselt:
 , (5)
, (5)
Kus  - füüsilise pendli lühendatud pikkus
- füüsilise pendli lühendatud pikkus
Valemist (5) saame väljendada füüsikalise pendli inertsmomenti pöörlemistelje suhtes
 (6)
(6)
Leidmine mõõtude järgi m, l Ja T, saate valemi (6) abil arvutada füüsikalise pendli inertsmomenti antud pöörlemistelje suhtes.
Antud töös kasutatakse füüsilist pendlit (joonis 2), mis kujutab endast terasvarda, millele on kinnitatud kaks massiivset terasläätse (A 1 ja A 2) ning vedrustuse tugiprisma (P 1 ja P 2). Sellise pendli inertsmoment on varda, läätsede ja prismade inertsimomentide summa:
 ,
,
Kus I 0 - varda inertsimoment raskuskeset läbiva telje suhtes.
 (7)
(7)
m St– varda mass,
l St- varda pikkus,
d– kaugus varda raskuskeskmest vedrustuspunktini.
Läätsede ja prismade inertsmomente saab ligikaudu arvutada nagu punktmasside puhul. Seejärel kirjutatakse pendli inertsimoment järgmiselt:
Kus  - läätsede massid A 1 ja A 2,
- läätsede massid A 1 ja A 2,
 - kaugused pöörlemisteljelt (riputuspunktist) läätsedeni vastavalt A 1 ja A 2,
- kaugused pöörlemisteljelt (riputuspunktist) läätsedeni vastavalt A 1 ja A 2,
 - prismade massid P 1 ja P 1,
- prismade massid P 1 ja P 1,
 - kaugused pöörlemisteljest vastavalt prismadele P 1 ja P 2.
- kaugused pöörlemisteljest vastavalt prismadele P 1 ja P 2.
Sest vastavalt töö tingimustele liigub ainult üks lääts A 1, siis muutub ainult inertsimoment  Ja
Ja


 (9)
(9)
Paigalduse kirjeldus.
Antud töös kasutatud füüsikaliseks pendliks (joonis 2) on terasvarras (C), millele on kinnitatud kaks massiivset terasläätse (A 1 ja A 2) ning vedrustuse tugiprisma (P 1 ja P 2). Pendel on riputatud kronsteinile.
Ühte läätse liigutades saab muuta pendli inertsmomenti vedrustuspunkti (pöörlemistelje) suhtes.
Pendli raskuskese määratakse pendli tasakaalustamisega spetsiaalse prisma horisontaalsel serval (joonis 3). Pendlivardale kantakse iga 10 mm järel rõngassooned, mille eesmärk on ilma joonlaua abita täpselt määrata kaugus raskuskeskmest pöörlemisteljeni. Läätse A 1 piki varrast veidi liigutades saavutate vahemaa l vedrustuspunktist raskuskeskmeni oli võrdne täisarv sentimeetrit, mõõdetuna varda skaalal.
Töö järjekord.
Määrake pendli raskuskeskme asukoht.
A  ) Eemaldage pendel kronsteinist ja paigaldage see horisontaalasendisse spetsiaalsele prismale P 3 (joonis 3), et see oleks tasakaalus. Täpne tasakaaluasend saavutatakse läätse A 1 veidi liigutamisega.
) Eemaldage pendel kronsteinist ja paigaldage see horisontaalasendisse spetsiaalsele prismale P 3 (joonis 3), et see oleks tasakaalus. Täpne tasakaaluasend saavutatakse läätse A 1 veidi liigutamisega.

Joonis 3. Pendli tasakaalustamine
b) Mõõtke pendli skaalal l - kaugus riputuspunktist (prisma serv P 1) pendli raskuskeskmeni (prisma ülemine serv P 3).
c) Mõõtke kaugus pendli skaala abil  - riputuspunktist (prisma serv P 1) ülemise läätseni A 1.
- riputuspunktist (prisma serv P 1) ülemise läätseni A 1.
2. Määrake füüsikalise pendli võnkeperiood.
a) Paigaldage pendel prismaga P 1 kronsteinile (joonis 2)
b) Määrake pendli täieliku 50 - 100 võnke aeg. Rekordaeg t ja number n pendli võnkumised.
c) Määrake füüsikalise pendli võnkeperiood järgmise valemi abil:
 (10)
(10)
3. Eemaldage pendel kronsteinist. Liigutage lääts A 1 mõne sentimeetri võrra uude kohta ja korrake katset. Mõõtmisi tuleb teha vähemalt kolme erineva läätse A 1 asendi jaoks riputuspunkti suhtes.
4. Arvuta valemi (6) abil füüsikalise pendli inertsimoment I op .
5. Arvutage ühe vaadeldava juhtumi inertsmomendi suhteline viga järgmise valemi abil:
 . (11)
. (11)
Väärtused T Ja l määratakse instrumentide täpsusklassi järgi.
6. Leia absoluutne viga  iga juhtumi puhul, võttes suhtelise vea
kõigil juhtudel sama.
iga juhtumi puhul, võttes suhtelise vea
kõigil juhtudel sama.
Lõpptulemus kirjuta vormi tabelisse

7. Arvuta valemi (8) abil pendli inertsimoment I teooria igaks juhuks.
8. Võrrelge saadud tulemusi I op Ja I teooria, arvutades suhte:
 (12)
(12)
Tehke järeldus, kui suur on saadud väärtuste lahknevus ja mis on lahknevuste põhjused.
Mõõtmiste ja arvutuste tulemused
|
№ p/p |
|
|
I teooria, kg m 2 |
|
||||
 ,
, , kg m 2
, kg m 2
Kontrollküsimused.
Mis on füüsiline pendel?
Kui suur on füüsilise pendli vähendatud pikkus?
Millist vibratsiooni nimetatakse harmooniliseks?
Mis on võnkeperiood?
Tuletage valem füüsikalise pendli võnkeperioodi arvutamiseks.
Mis on inertsimoment? Mis on inertsmomendi liitivus?
Hankige valem füüsikalise pendli inertsmomendi arvutamiseks.
Kirjandus
1. Saveljev I.V. Üldfüüsika kursus: õpik. käsiraamat kõrgkoolidele: 3 köites T.1: Mehaanika. Molekulaarfüüsika. - 3. väljaanne, rev. - M.: Nauka, 1986. – 432 lk.
2. Detlaf A. A., Yavorsky B. M. Füüsika kursus: õpik. toetus kolledžitele. - M.: Kõrgkool, 1989. - 607 lk. - teema dekreet: lk. 588-603.
3. Füüsika labori töötuba: Proc. käsiraamat kolledži üliõpilastele / B. F. Aleksejev, K. A. Barsukov, I. A. Voitsekhovskaja jt; Ed. K. A. Barsukova ja Yu. I. Ukhanova. – M.: Kõrgem. kool, 1988. – 351 lk.: ill.
Pole raske näidata, et jäiga keha mis tahes liikumist (näiteks astronaudi liikumist treeningtsentrifuugides jne) saab kujutada kahe lihtsa liikumise tüübi – translatsioonilise ja pöörleva – superpositsioonina.
Translatsioonilise liikumise käigus saavad kõik keha punktid võrdse aja jooksul võrdse suuruse ja suunaga liikumisi, mille tulemusena on kõikide punktide kiirused ja kiirendused igal ajahetkel ühesugused.
Pöörleva liikumise ajal liiguvad kõik jäiga keha punktid ringidena, mille keskpunktid asuvad samal sirgel, mida nimetatakse pöörlemisteljeks. Pöörleva liikumise jaoks peate igal ajahetkel määrama pöörlemistelje asukoha ruumis ja keha nurkkiiruse.
Huvitav on võrrelda pöörleva jäiga keha mehaanika põhisuurusi ja valemeid ning materiaalse punkti translatsioonilist liikumist. Sellise võrdluse mugavuse huvides on tabelis 1 vasakul translatsiooniliikumise väärtused ja põhilised seosed ning paremal - sarnased pöörleva liikumise jaoks.
Tabel 1
| Edasi liikumine | Pöörlev liikumine |
| S- tee - lineaarkiirus - lineaarne kiirendus m- kehamass - keha impulss - jõud Dünaamika põhiseadus: Kineetiline energia: - töö | - pöörlemine - nurkkiirus - nurkkiirendus J- inertsimoment - impulsimoment - jõumoment Dünaamika põhiseadus: Kineetiline energia: - töö |
Tabelis on näidatud, et suhetes üleminek translatsiooniliikumiselt pöörlevale liikumisele toimub, asendades kiiruse nurkkiirusega, kiirenduse nurkkiirendusega jne.
Antud töös käsitletakse tasapinnalist liikumist, s.o. selline, milles välisjõudude mõjul liiguvad kõik keha punktid paralleelsetes tasandites. Tasapinnalise liikumise näide on silindri veeremine mööda tasapinda.
Seda liikumist saab kujutada kahe liigutuse summana – translatsioonilise kiirusega ja pöörleva nurkkiirusega.
Olles nimetanud tugisüsteemi, mille suhtes käsitleme jäiga keha keerulist liikumist, liikumatuks, võib keha liikumist kujutada nurkkiirusega pöörlemisena. Võrdlussüsteemis, mis liigub liikumatu kaadri suhtes translatsiooniliselt kiirusega .
Seega on keha iga punkti kiirendus translatsioonilise liikumise kiirenduse ja ümber massikeskpunkti läbiva telje pöörlemise ajal tekkiva kiirenduse summa. Translatsioonilise liikumise kiirendus on kõigi keha punktide jaoks ühesugune ja võrdne
kus on kõigi välisjõudude hetk keha massikeskpunkti läbiva telje suhtes,
- keha inertsmoment sama telje suhtes.
Käesolevas töös uuritakse keha tasapinnalist liikumist Maxwelli pendli liikumise näitel.
Maxwelli pendel koosneb lamedast metallvardast – teljest AB, mille külge on sümmeetriliselt kinnitatud ketas C (joonis 1). Telje otste külge on kinnitatud kaks keerme, mis on eelnevalt ümber telje keritud. Keermete vastasotsad kinnitatakse ülemise klambri külge. Ketas langetatakse raskusjõu toimel keermedele, mis kerivad lahti täies pikkuses. Ketas, jätkates oma pöörlemisliikumist samas suunas, kerib keermed ümber telje, mille tulemusena tõuseb see üles, aeglustades samal ajal pöörlemist. Ülemisse punkti jõudes läheb ketas uuesti alla jne. Ketas võngub üles-alla, mistõttu sellist seadet nimetatakse pendliks. Töö sisuks on mõõta pendli inertsmomenti ja võrrelda saadud tulemusi teadaolevate valemite abil teoreetiliselt arvutatutega.
Koostame pendli translatsioonilise liikumise võrrandi, võtmata arvesse hõõrdejõude õhuga (vt joon. 1)
kus on telje raadius;
Ühe keerme pingutusjõud.
Translatsiooni- ja pöörlemiskiirendused on seotud seosega
Võrranditest (4.3), (4.4), (4.5) ja (4.6) väljendame Maxwelli pendli inertsimomenti:
kus on pendli telje inertsimoment;
m o - telje mass;
Pendelketta inertsimoment;
ketta välimine raadius;
m D - ketta mass;
Ainult asendusrõnga inertsmoment;
Rõnga välimine raadius;
m k on rõnga mass.
EKSPERIMENTAALSE PAIGALDUSE KIRJELDUS
Paigalduse üldvaade on näidatud joonisel fig. 2.
Aluse 1 vertikaalse posti külge on kinnitatud kaks kronsteini: ülemine 2 ja alumine 3. Ülemine kronstein on varustatud elektromagnetitega ja seadmega 4 kaheharulise vedrustuse 5 kinnitamiseks ja reguleerimiseks. Pendel on ketas 6, mis on paigaldatud telg 7 riputatud bifilaarsele vedrustusele. Kettale on kinnitatud vahetatavad rõngad 8. Vahetatavate rõngastega pendel fikseeritakse elektromagneti abil ülemisse lähteasendisse.
Vertikaalsel alusel on millimeetri skaala, mille abil määratakse pendli käik.
Fotoandur 9 on eraldiseisev koost, mis on kinnitatud vertikaalse aluse allosas oleva kronsteini 3 abil. Klamber võimaldab fotosensorit liigutada piki vertikaalset posti ja fikseerida mis tahes asendis skaalas 0 - 420 mm.
Fotosensor 9 on mõeldud elektriliste signaalide väljastamiseks füüsilisele millisekundikellale 10. Milisekundiline kell on valmistatud iseseisva seadmena, millel on digitaalne ajakuva. See on jäigalt kinnitatud aluse 1 külge.
EKSPERIMENTAALNE MEETOD JA TULEMUSTE TÖÖTLEMINE
1. harjutus. Määrake Maxwelli pendli parameetrid.
1. Joonista tabel. 1.
Tabel 1
| Pendli telg | Pendelketas | Sõrmused | |||||||
| № | R o, m | L o, m | R D, m | L D, m | R k1, m | R k2, m | R k3, m | ||
| Keskmised väärtused | |||||||||
| V o = | m o = | V D = | m D = | ||||||
2. Mõõtke nihiku abil R Ja L, arvutage telje ja ketta mahud V o ja V D.
3. Arvutage massiväärtused metalli (alumiiniumi), millest telg ja ketas on valmistatud, tiheduse tabeliväärtuste abil m o ja m D. Sisestage saadud tulemused tabelisse. 1.
4. Mõõtke väärtused nihikuga R k (kolme helina jaoks) ja sisestage tabelisse. 1. Määrake keskmised väärtused.
2. ülesanne. Määrake pendli inertsimoment
1. Joonista tabel. 2.
2. Määrake skaalat kasutades 3. sulu indikaatorit kasutades pendli käik h.
tabel 2
| m k1 = kg; | h= m; | |||||||
| t, Koos | t kolmapäev, s | |||||||
| m k 2 = kg; | ||||||||
| t, Koos | t kolmapäev, s | |||||||
| m k 3 = kg; | ||||||||
| t, Koos | t kolmapäev, s | |||||||
3. Vajutage millisekundikella esipaneelil asuvat nuppu "Võrk", mille fotosensori tuli ja millisekundi kella digitaalsed indikaatorid peaksid süttima.
4. Pöörates pendlit, kinnitage see elektromagneti abil ülemisse asendisse, tagades samal ajal, et niit on keritud teljele, pöörake pööramiseks.
5. Vajutage nuppu "Lähtesta", et veenduda, et indikaatorid on seatud nulli.
6. Kui vajutate millisekundikellal nuppu "Start", peaks elektromagnet pingest välja lülituma, pendel peaks hakkama lahti kerima, millisekundikell peaks aega alla lugema ja hetkel, mil pendel ületab kella optilise telje. fotosensor, peaks aja lugemine lõppema.
7. Tehke testid vastavalt punktidele 4 - 6 vähemalt viis korda ja määrake keskmine ajaväärtus t.
8. Määrata valemi (4.7) abil pendli inertsimoment.
9. Tehke testid vastavalt punktidele 4 - 6 kolme asendusrõnga jaoks.
10. Sisestage kõik saadud tulemused tabelisse. Määrake keskmised väärtused.
12. Võrrelge pendli (4.8) inertsmomendi teoreetilisi väärtusi katseväärtustega.
Kontrollküsimused
1. Mida nimetatakse tasapinnaliseks paralleelseks liikumiseks?
2. Millised kaks liigutust moodustavad pendli keeruka liikumise? Kirjeldage neid.
3. Tõesta, et pendel liigub massikeskme konstantse kiirendusega.
4. Määratlege inertsimoment. Kirjutage üles ketta või rõnga inertsmomendi avaldis.
5. Sõnasta mehaanilise energia jäävuse seadus. Kirjutage see üles nii, nagu seda on rakendatud Maxwelli pendlile.